
Des applications géométriques des systèmes linéaires
- Fiche de cours
- Quiz et exercices
- Vidéos et podcasts
- Connaitre la position relative de deux plans.
- Savoir déterminer l’intersection de deux plans.
- Déterminer si trois vecteurs de l’espace forment une base.
- Déterminer les coordonnées d’un vecteur dans une base.
- L’intersection de deux plans sécants est une droite.
- Deux plans P et P’ sont perpendiculaires si et seulement si leurs vecteurs normaux sont orthogonaux.
- On considère la base de l’espace
 . Pour connaitre les
coordonnées d’un vecteur
. Pour connaitre les
coordonnées d’un vecteur  de l’espace dans la
base
de l’espace dans la
base , il suffit de trouver les
coefficients a,
b,
c tels
que
, il suffit de trouver les
coefficients a,
b,
c tels
que  .
.
- Résoudre un système.
- Connaitre la notion de vecteur normal à un plan.
- Savoir que trois vecteurs de l’espace non nuls forment une base s’ils ne sont pas coplanaires.
- Connaitre la notion d’équation cartésienne d’un plan.
Dans l’espace, deux plans peuvent être :
- confondus ;
- strictement parallèles, c’est-à-dire qu’ils n’ont aucun point en commun (figure 1) ;
- sécants (figure 2).
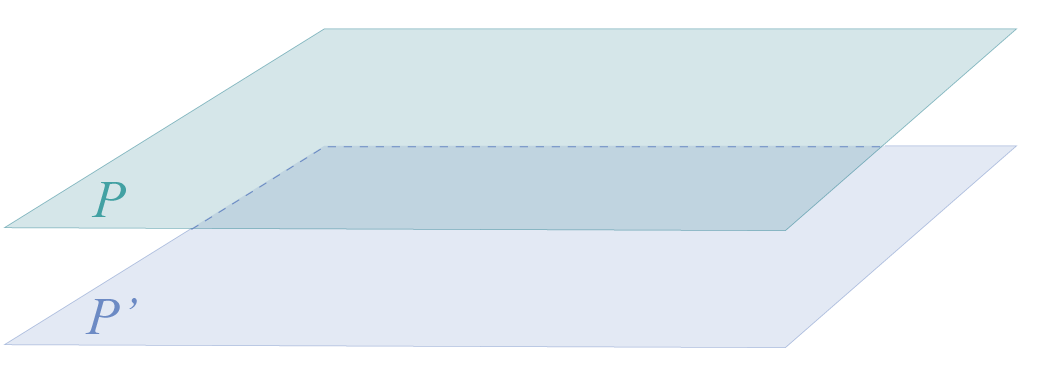 Figure 1 Figure 1
|
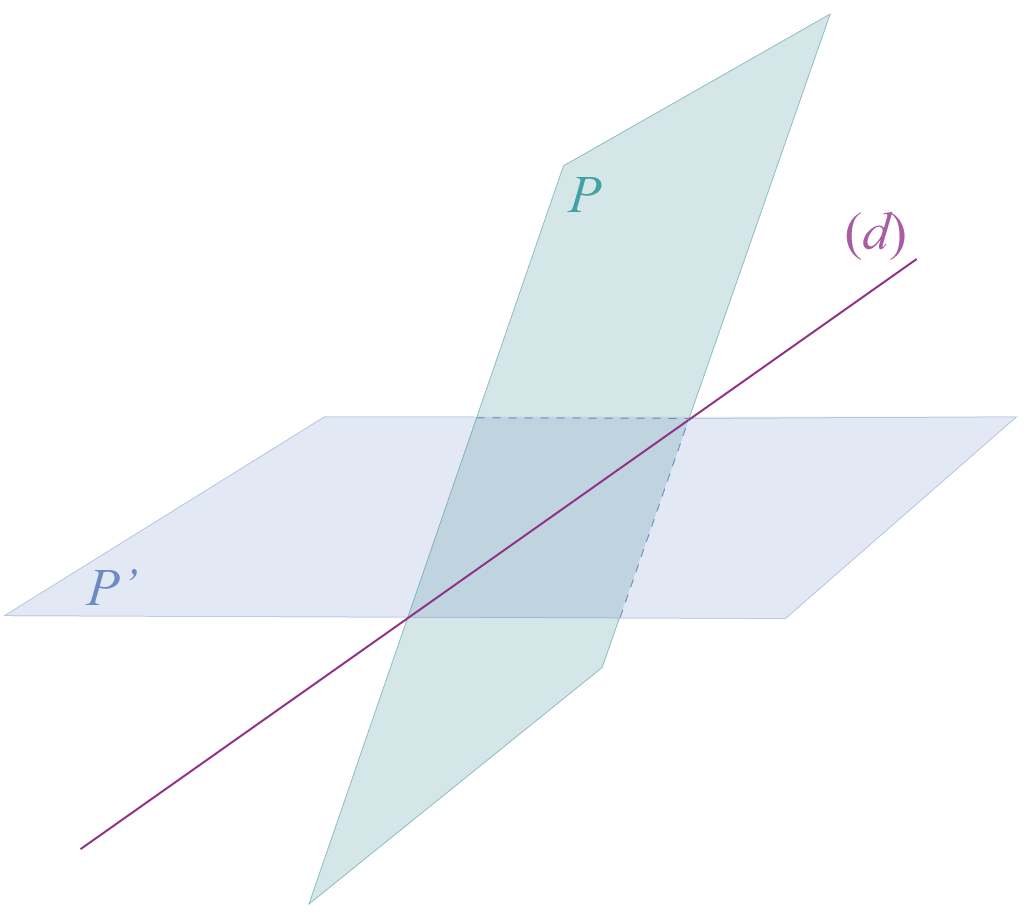 Figure 2 Figure 2
|
À ce sujet, on peut consulter la fiche « Positions relatives de droites et de plans dans l’espace ».
Si deux plans sont parallèles, alors ils ont des vecteurs normaux colinéaires.
Si deux plans sont sécants, leur intersection est une droite. Cette droite a un vecteur directeur qui est orthogonal à chacun des vecteurs normaux des deux plans.
On se place dans un repère orthonormé
 .
.
On considère deux plans P et P’ d’équations respectives ax + by + cz + d = 0 et a’x + b’y + c’z + d’ = 0. L’intersection de P et P’ est l’ensemble des points dont les coordonnées (x ; y ; z) sont les solutions du système
 .
.Il s’agit d’une droite.
Il est possible de convertir le système de deux équations à deux inconnues précédent en équations paramétriques. Il suffit pour cela de poser x = t ou y = t ou z = t, c’est-à-dire de considérer l’une des inconnues comme le paramètre des équations paramétriques.
Deux plans P et P’ sont
perpendiculaires si et seulement si leurs vecteurs
normaux  et
et  sont orthogonaux. On peut
exprimer cette condition à l’aide du
produit scalaire
sont orthogonaux. On peut
exprimer cette condition à l’aide du
produit scalaire  .
.
Les considérations précédentes permettent de conclure à l’existence de solutions de certains systèmes d’équations. Nous considérerons dans la suite les nombres a, b, c, d, a’, b’, c’ et d’ tels que (a ; b ; c) ≠ (0 ; 0 ; 0) et (a’ ; b’ ; c’) ≠ (0 ; 0 ; 0) et tels que les quadruplets (a ; b ; c ; d) et (a’ ; b’ ; c’ ; d’) ne soient pas proportionnels.
On considère le système
 au triplet inconnu
(x ; y ; z).
au triplet inconnu
(x ; y ; z).Il n’admet aucune solution si et seulement si il existe un réel k tel que l’on ait simultanément les trois égalités a’ = ka ; b’ = kb et c’ = kc, autrement dit si et seulement si les triplets (a ; b ; c) et (a’ ; b’ ; c’) sont proportionnels.
Il admet des solutions si et seulement si les triplets (a ; b ; c) et (a’ ; b’ ; c’) ne sont pas proportionnels.
Dans un repère orthonormé , les deux équations
précédentes sont celles de deux plans
P et
P’
dont les vecteurs normaux et ont pour
coordonnées respectives (a ; b ; c)
et (a’ ; b’ ; c’).
Le système précédent n’admet
aucune solution si et seulement si les deux plans sont
strictement parallèles, donc si et seulement si
les triplets (a ; b ; c)
et (a’ ; b’ ; c’)
sont proportionnels.
L’hypothèse que les quadruplets (a ; b ; c ; d) et (a’ ; b’ ; c’ ; d’) ne sont pas proportionnels garantit que les plans ne sont pas confondus.
Trois vecteurs de l’espace non nuls forment une base s’ils ne sont pas coplanaires, c’est-à-dire si un des vecteurs ne peut pas s’écrire comme combinaison des deux autres.
Soit les vecteurs
 (1 ; 2 ; 3)
,
(1 ; 2 ; 3)
,  (2 ; 3 ; 4) et
(2 ; 3 ; 4) et
 (0 ; 3 ; 2).
Le triplet forme-t-il une base de
l’espace ?
(0 ; 3 ; 2).
Le triplet forme-t-il une base de
l’espace ?Pour cela, il faut chercher s’il existe k et k’ tels que
 .
.Ceci revient à écrire le système
 .
.En utilisant l’équation (1), on trouve que k = – 2k’.
En injectant cette relation dans les équations (2) et (3), on trouve :
- pour (2) :
 ;
;
- pour (3) :
 .
.
Ainsi, on trouve des valeurs différentes
de k’ suivant
l’équation choisie. Ceci est impossible.
Il n’existe donc pas de k et
de k’
qui vérifient .
Conclusion : les vecteurs vecteurs , et ne sont pas coplanaires et donc
le triplet forme une base de
l’espace.
On considère la base de l’espace . Pour connaitre les
coordonnées d’un vecteur de l’espace dans la
base , il suffit de trouver les
coefficients a, b, c tels que  .
.
On considère la base formée par les vecteurs
(1 ; 2 ; 3) ,
(2 ; 3 ; 4) et
(0 ; 3 ; 2).
Déterminons les coordonnées du vecteur
(5 ; 17 ; 17)
dans cette base.Il faut trouver a, b, c tels que
 .
.On obtient le système suivant :
 .
.que l’on échelonne pour trouver :
 .
.D’où finalement b = 2, a = 1 et c = 3.
Dans la base
, le vecteur a pour coordonnées
(1 ; 2 ; 3).
Évalue ce cours !
Des quiz et exercices pour mieux assimiler sa leçon
La plateforme de soutien scolaire en ligne myMaxicours propose des quiz et exercices en accompagnement de chaque fiche de cours. Les exercices permettent de vérifier si la leçon est bien comprise ou s’il reste encore des notions à revoir.
Des exercices variés pour ne pas s’ennuyer
Les exercices se déclinent sous toutes leurs formes sur myMaxicours ! Selon la matière et la classe étudiées, retrouvez des dictées, des mots à relier ou encore des phrases à compléter, mais aussi des textes à trous et bien d’autres formats !
Dans les classes de primaire, l’accent est mis sur des exercices illustrés très ludiques pour motiver les plus jeunes.

Des quiz pour une évaluation en direct
Les quiz et exercices permettent d’avoir un retour immédiat sur la bonne compréhension du cours. Une fois toutes les réponses communiquées, le résultat s’affiche à l’écran et permet à l’élève de se situer immédiatement.
myMaxicours offre des solutions efficaces de révision grâce aux fiches de cours et aux exercices associés. L’élève se rassure pour le prochain examen en testant ses connaissances au préalable.

Des vidéos et des podcasts pour apprendre différemment
Certains élèves ont une mémoire visuelle quand d’autres ont plutôt une mémoire auditive. myMaxicours s’adapte à tous les enfants et adolescents pour leur proposer un apprentissage serein et efficace.
Découvrez de nombreuses vidéos et podcasts en complément des fiches de cours et des exercices pour une année scolaire au top !

Des podcasts pour les révisions
La plateforme de soutien scolaire en ligne myMaxicours propose des podcasts de révision pour toutes les classes à examen : troisième, première et terminale.
Les ados peuvent écouter les différents cours afin de mieux les mémoriser en préparation de leurs examens. Des fiches de cours de différentes matières sont disponibles en podcasts ainsi qu’une préparation au grand oral avec de nombreux conseils pratiques.

Des vidéos de cours pour comprendre en image
Des vidéos de cours illustrent les notions principales à retenir et complètent les fiches de cours. De quoi réviser sa prochaine évaluation ou son prochain examen en toute confiance !




Fiches de cours les plus recherchées


Envie de progresser et de réussir votre année scolaire ?
Testez gratuitement pendant 24h notre plateforme de soutien scolaire !

Un espace dédié aux parents pour suivre les progrès
Tout le programme scolaire du CP à la Terminale
Des profs expérimentés disponibles à la demande par tchat, audio ou vidéo