
Densité de probabilité et fonction de répartition
- Fiche de cours
- Quiz et exercices
- Vidéos et podcasts
- Connaitre la fonction de densité de la loi uniforme sur [a ; b].
- Concevoir et exploiter une simulation dans le cadre d’une loi uniforme.
- Une fonction de densité de probabilité
sur un intervalle de réels I est une
fonction f
définie, continue et positive sur I telle que
 , c’est-à-dire
que l’aire délimitée sous la courbe sur
l’intervalle I est égale à 1.
, c’est-à-dire
que l’aire délimitée sous la courbe sur
l’intervalle I est égale à 1.
- Une variable aléatoire à
densité X sur un
intervalle I est
définie par la donnée d’une fonction de
densité de probabilité f définie
sur I. La
probabilité que X appartienne à un
intervalle [a ; b] de I est égale à
l’aire sous la courbe de f sur [a ; b], autrement dit
P(a ≤ X ≤ b) =
 .
.
- Pour tout réel c de I,
P(X = c) = 0
(car
 ). On en déduit
que :
). On en déduit
que :
- pour tous réels c et d de I, P(c ≤ X ≤ d) = P(c ≤ X < d) = P(c < X ≤ d) = P(c < X < d).
- pour tout réel c de I, P(X > c) = P(X ≥ c) = 1 – P(X < c).
- On appelle fonction de répartition d’une
variable aléatoire à
densité X la
fonction F
définie sur
 par F(x) = P(X ≤ x).
Si f est la
fonction de densité de probabilité
définie sur [a ; b] de la
variable X, alors :
par F(x) = P(X ≤ x).
Si f est la
fonction de densité de probabilité
définie sur [a ; b] de la
variable X, alors :
- si x < a, on a P(X ≤ x) = 0 (car comme a ≤ X ≤ b et x < a, alors x < a ≤ X et « X ≤ x » est un événement impossible) ;
- si x ∈ [a ; b],
on a P(X ≤ x) =
 ;
;
- si x > b, on a P(X ≤ x) = 1 (car comme a ≤ X ≤ b et x > b, alors X ≤ b < x et « X ≤ x » est un événement certain).
- Connaitre les notions de continuité et d'intégration (primitives) et effectuer des calculs nécessitant une calculatrice ou un logiciel.
- Calculer une aire, une intégrale.
Lors d’une étude (statistique entre autre), on est souvent amené à étudier des variables aléatoires pouvant prendre toutes les valeurs (en continu) d’un intervalle I = [a ; b] de réels. On dira que ces variables sont continues (elles sont parfois regroupées en classes).
La taille d’un adulte est une variable continue pouvant prendre toutes les valeurs entre 0,546 m et 2,72 m, selon le livre Guinness des records. La taille réelle est continue, la mesure effectuée est une approximation, donc une valeur ponctuelle, discrète.
 ,
c’est-à-dire que l’aire
délimitée sous la courbe sur
l’intervalle I est égale
à 1.
,
c’est-à-dire que l’aire
délimitée sous la courbe sur
l’intervalle I est égale
à 1.
 .
.
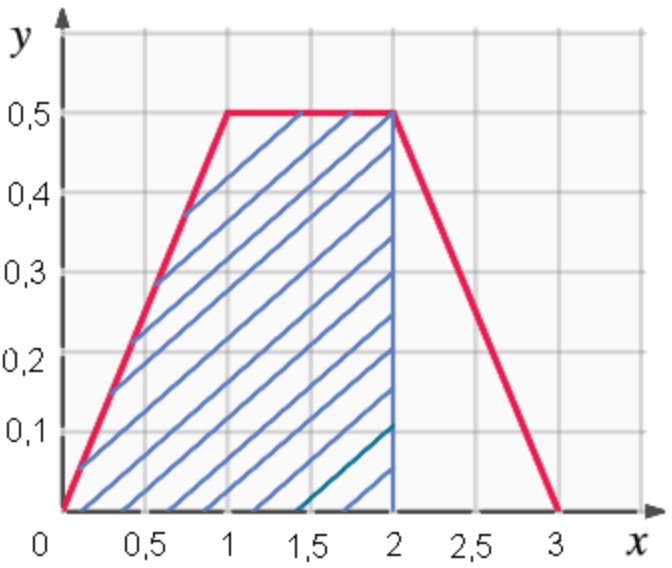
Le graphique ci-dessus représente la fonction
de densité de
probabilité f d’une variable
aléatoire X
sur [0 ; 3].
En effet, f est continue,
positive sur cet intervalle et l’aire
délimitée sous la courbe entre 0
et 3 est égale à 1,
c’est-à-dire  .
.
De plus, P(0 ≤ X ≤ 2)
est l’aire délimitée sous la
courbe de f entre 0
et 2 (aire de la partie hachurée),
c’est-à-dire P(0 ≤ X ≤ 2) =  = 0,75.
= 0,75.
Pour tout réel c de I, P(X = c) = 0 (car
 ).
).On en déduit que :
- Pour tous réels c et d de I, P(c ≤ X ≤ d) = P(c ≤ X < d) = P(c < X ≤ d) = P(c < X < d).
- Pour tout réel c de I, P(X > c) = P(X ≥ c) = 1 – P(X < c).
• On considère que le résultat ne change pas si l’intervalle I = [a ; b] est ouvert (par exemple I = [a ; b[) ou que l’une (ou les deux) des bornes est infinie (I = [a ; +∞[).
• Pour une fonction de densité de probabilité sur I = [a ; b], pour tout réel c de I, P(X = c) = 0. Il s’agit ici d’essayer de comprendre ce qu’il se passe :
- Sur le segment [0 ; 1], posons une bille de diamètre 1. Elle occupe toute la place. La probabilité de prendre une bille sur le segment est donc 1.
- Sur le même segment [0 ; 1], posons dix billes de diamètre 0,1. Elles occupent toute la place (en longueur). La probabilité de prendre une bille sur le segment est donc 0,1.
- Sur le même segment [0 ; 1], posons un million de billes de diamètre 106. La probabilité de prendre une bille sur le segment est donc 0,000 001, ce qui est très très petit.
- Si sur le segment [0 ; 1] nous
plaçons n billes, la
probabilité de tirer une de ces billes sur ce
segment sera de
 .
.
Si l’on place une des n billes en
chacun des nombres (il y en a une infinité) du
segment, alors  avec
avec  .
.
On peut ainsi comprendre pourquoi la probabilité d’obtenir un nombre particulier est nulle (P(X = c) = 0).
Une cible d'un mètre de diamètre est utilisée pour un concours.
- Cas du discret (nous travaillons sur des parties que l’on peut compter)
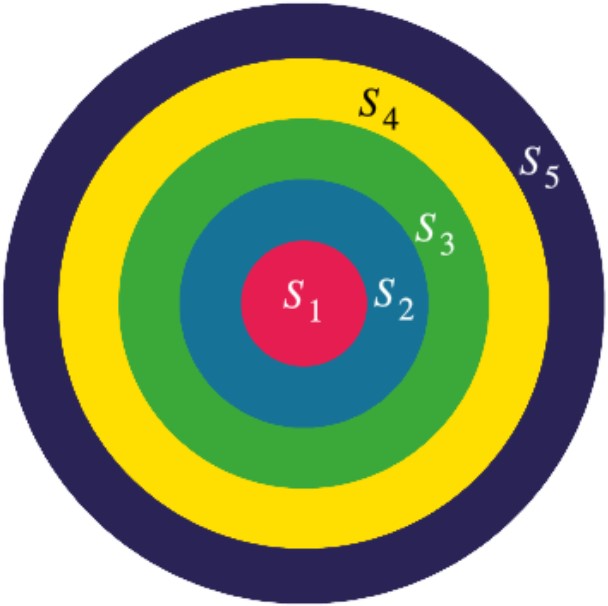
Cinq surfaces concentriques, nommées
S1,
S2,
S3,
S4 et
S5, sont
coloriées sur la cible, la première de
rayon 0,1 m, la seconde comprise entre la
première et le cercle de
rayon 0,2 m, etc.
On considère qu’il y a
équiprobabilité, donc la
probabilité d’obtenir une partie est
proportionnelle à son aire.
Aire totale : A = πr2 = π =
=  = 0,25 π.
= 0,25 π.
S1 = π(10–1)2 = π × 10–2
S2 = π(2 × 10–1)2 – π(10–1)2 = 3 π × 10–2
S3 = π(3 × 10–1)2 – π(2 × 10–1)2 = 5 π × 10–2
S4 = 7π × 10–2
et S5 = 9π × 10–2
Alors :
P(S1) =  =
=  = 0,04 ; P(S2) =
= 0,04 ; P(S2) =  = 0,12 ; P(S3) =
= 0,12 ; P(S3) =  = 0,20 ; P(S4) =
= 0,20 ; P(S4) =  = 0,28 et P(S5) =
= 0,28 et P(S5) =  = 0,36.
= 0,36.
- Cas du continu
La cible est uniforme, sans découpage. La
règle choisie est de mesurer après
chaque tir la distance entre le centre et le point
d’impact. Cette distance est une valeur de
l’intervalle [0 ; 0,5].
On choisit la fonction de densité de
probabilité sur
l’intervalle I = [0 ; 0,5] : f :
x ↦ f (x) = 8
x.
Montrons qu’il s’agit bien d’une
fonction de densité :
sur I,
c’est une fonction continue (fonction
polynôme), positive, avec :

f est bien
une fonction densité sur I.
Nous avons :
P(0 ≤ X ≤ 0,1) =  = 4(0,1)2 – 4(0)2 = 0,04
= 4(0,1)2 – 4(0)2 = 0,04
P(0,1 ≤ X ≤ 0,2) =  =
4(0,2)2 – 4(0,1)2=
0,12
=
4(0,2)2 – 4(0,1)2=
0,12
P(0,2 ≤ X ≤ 0,3) =  = 0,20
= 0,20
P(0,3 ≤ X ≤ 0,4) =  = 0,28
= 0,28
P(0,4 ≤ X ≤ 0,5) =  = 0,36
= 0,36
On constate qu'on obtient les mêmes
probabilités que dans le cas
précédent.
 par F(x) = P(X ≤ x).
par F(x) = P(X ≤ x).Si f est la fonction de densité de probabilité définie sur [a ; b] de la variable X, alors :
- si x < a, on a P(X ≤ x) = 0 (car comme a ≤ X ≤ b et x < a, alors x < a ≤ X et « X ≤ x » est un événement impossible) ;
- si x ∈ [a ; b],
on a P(X ≤ x) =
 ;
;
- si x > b, on a P(X ≤ x) = 1 (car comme a ≤ X ≤ b et x > b, alors X ≤ b < x et « X ≤ x » est un événement certain).
Soit f la fonction définie sur [1 ; 2] par f (x) = –x + 2,5.
f est continue sur [1 ; 2] car c’est une fonction affine et f est positive sur [1 ; 2] car pour tout x ∈ [1 ; 2], f (x) ≥ 0.
De plus,






f est donc une fonction de densité
sur [1 ; 2].
Si X est une
variable aléatoire à densité, de
fonction de densité f sur [1 ; 2],
alors sa fonction de répartition
est :
[a ; b] = ]–∞ ; b] – ]–∞ ; a[
P(a ≤ X ≤ b) = P(X ≤ b) – P(X < a) = P(X ≤ b) – P(X ≤ a) = F(b) – F(a)
Évalue ce cours !
Des quiz et exercices pour mieux assimiler sa leçon
La plateforme de soutien scolaire en ligne myMaxicours propose des quiz et exercices en accompagnement de chaque fiche de cours. Les exercices permettent de vérifier si la leçon est bien comprise ou s’il reste encore des notions à revoir.
Des exercices variés pour ne pas s’ennuyer
Les exercices se déclinent sous toutes leurs formes sur myMaxicours ! Selon la matière et la classe étudiées, retrouvez des dictées, des mots à relier ou encore des phrases à compléter, mais aussi des textes à trous et bien d’autres formats !
Dans les classes de primaire, l’accent est mis sur des exercices illustrés très ludiques pour motiver les plus jeunes.

Des quiz pour une évaluation en direct
Les quiz et exercices permettent d’avoir un retour immédiat sur la bonne compréhension du cours. Une fois toutes les réponses communiquées, le résultat s’affiche à l’écran et permet à l’élève de se situer immédiatement.
myMaxicours offre des solutions efficaces de révision grâce aux fiches de cours et aux exercices associés. L’élève se rassure pour le prochain examen en testant ses connaissances au préalable.

Des vidéos et des podcasts pour apprendre différemment
Certains élèves ont une mémoire visuelle quand d’autres ont plutôt une mémoire auditive. myMaxicours s’adapte à tous les enfants et adolescents pour leur proposer un apprentissage serein et efficace.
Découvrez de nombreuses vidéos et podcasts en complément des fiches de cours et des exercices pour une année scolaire au top !

Des podcasts pour les révisions
La plateforme de soutien scolaire en ligne myMaxicours propose des podcasts de révision pour toutes les classes à examen : troisième, première et terminale.
Les ados peuvent écouter les différents cours afin de mieux les mémoriser en préparation de leurs examens. Des fiches de cours de différentes matières sont disponibles en podcasts ainsi qu’une préparation au grand oral avec de nombreux conseils pratiques.

Des vidéos de cours pour comprendre en image
Des vidéos de cours illustrent les notions principales à retenir et complètent les fiches de cours. De quoi réviser sa prochaine évaluation ou son prochain examen en toute confiance !




Fiches de cours les plus recherchées

Envie de progresser et de réussir votre année scolaire ?
Testez gratuitement pendant 24h notre plateforme de soutien scolaire !

Un espace dédié aux parents pour suivre les progrès
Tout le programme scolaire du CP à la Terminale
Des profs expérimentés disponibles à la demande par tchat, audio ou vidéo