
Réaliser et exploiter une chronophotographie, déterminer les vecteurs vitesse et accélération
- Fiche de cours
- Quiz et exercices
- Vidéos et podcasts
- Réaliser et/ou exploiter expérimentalement une vidéo ou une chronophotographie pour déterminer les coordonnées du vecteur position en fonction du temps.
- En déduire les coordonnées approchées ou les représentations des vecteurs vitesse et accélération.
- Faire la chronophotographie du mouvement d’un système correspond à mettre les positions successives du système à des intervalles de temps réguliers et petits sur une même photographie.
- Le vecteur vitesse
 d’un point M en mouvement est égal
à la dérivée par rapport au temps du
vecteur position
d’un point M en mouvement est égal
à la dérivée par rapport au temps du
vecteur position  .
.
On le détermine de manière approchée avec la chronophotographie, à partir de deux positions successives du point M, Mi et Mi+1.
- Le vecteur
accélération
 d’un point M en mouvement est égal
à la dérivée par rapport au temps du
vecteur vitesse .
d’un point M en mouvement est égal
à la dérivée par rapport au temps du
vecteur vitesse .
On le détermine de manière approchée avec la chronophotographie, à partir de deux vecteurs vitesse successifs, et
et  .
.
Vecteurs position, vitesse et accélération
Lors du mouvement d’un système, on peut réaliser une chronophotographie.

Chronophotographie d'un skieur
Le choix de la valeur de l’intervalle de temps entre deux photographies successives est fait en fonction de la durée du mouvement.
Une fois la chronophotographie réalisée, on
choisit un des points du système en mouvement
étudié, et on relève ses positions
successives que l’on place dans un
repère  .
Il s’agit d’une étape de
pointage.
.
Il s’agit d’une étape de
pointage.
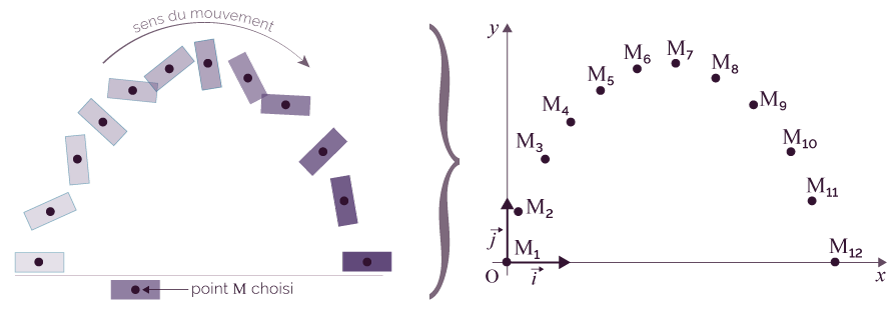
Passage de la chronophotographie
aux positions d’un point M dans un repère
On peut alors déterminer le vecteur
position  pour chaque point de la trajectoire du
point M.
pour chaque point de la trajectoire du
point M.
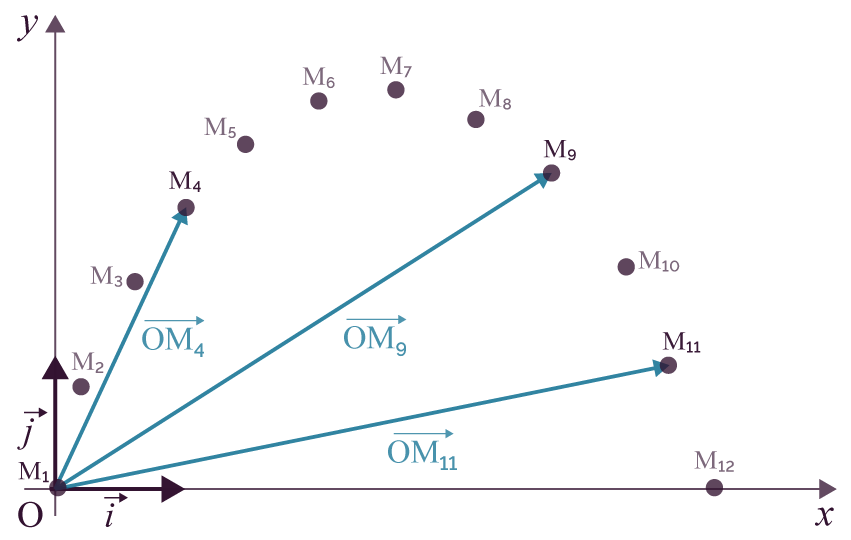
Vecteurs position du point M
À partir de la chronophotographie, on peut déterminer les vecteurs vitesse et accélération en chaque point de la trajectoire du point M repéré.
 d’un point M en mouvement est égal
à la dérivée par rapport au temps
du vecteur position
d’un point M en mouvement est égal
à la dérivée par rapport au temps
du vecteur position  .
.
Ce vecteur est tangent à la trajectoire au point M, et est dirigé dans le sens du mouvement.
On peut déterminer ce vecteur de manière approchée avec la chronophotographie, à partir de deux positions successives du point M, que l’on nommera Mi et Mi+1.
|
|

|
Point mathématique Voici quelques relations vectorielles qui sont à connaitre.
|

On fait l’approximation qui consiste à assimiler le vecteur vitesse moyenne entre deux points successifs Mi et Mi+1, avec le vecteur vitesse au point Mi.
Cette approximation est valable à condition que l’intervalle de temps Δt soit suffisamment petit (de l’ordre de la milliseconde ou de la microseconde).
Le vecteur vitesse  est colinéaire au vecteur
déplacement
est colinéaire au vecteur
déplacement  : il a le même sens et la même
direction.
: il a le même sens et la même
direction.
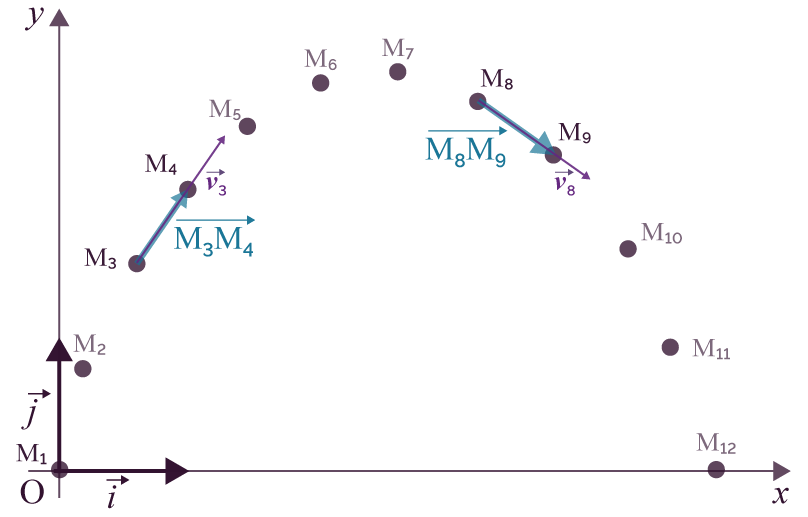
Tracé de vecteurs vitesse
à partir d’une chronophotographie
Les coordonnées du vecteur vitesse dans le
repère peuvent être calculées à
partir de celles du point M.
|
|
avec :
|
- 1 ms = 1 × 10–3 s ; 1 μs = 1 × 10–6 s ; 1 ns = 1 × 10–9 s
- 1 cm = 1 × 10–2 m ; 1 mm = 1 × 10–3 m ; 1 μm = 1 × 10–6 m
 d’un point M en mouvement est égal
à la dérivée par rapport au temps
du vecteur vitesse
d’un point M en mouvement est égal
à la dérivée par rapport au temps
du vecteur vitesse  .
.
On peut déterminer ce vecteur de manière
approchée avec la chronophotographie, à
partir de deux positions successives du
point M, que
l’on nommera Mi et Mi+1,
pour lesquelles on a les vecteurs
vitesses  et
et  .
.
On obtient alors le vecteur
accélération  au point Mi.
au point Mi.

|
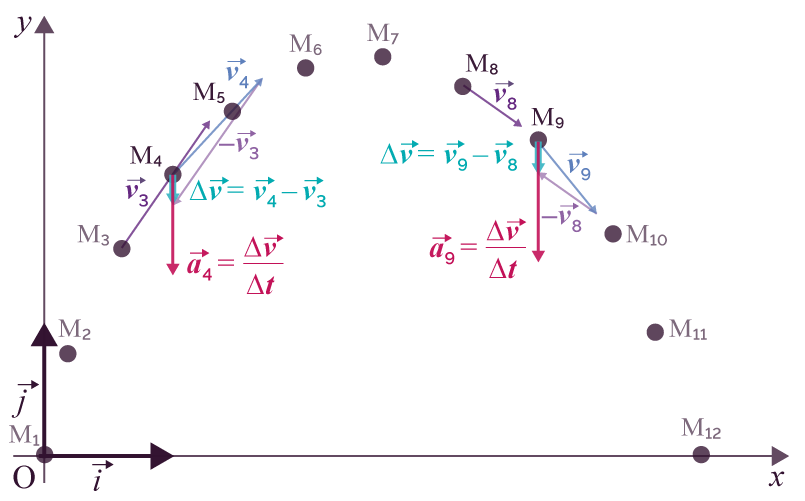
Tracé de vecteurs accélération
à partir d’une chronophotographie
Les coordonnées du vecteur
accélération dans le
repère peuvent être calculées à
partir de celles du vecteur vitesse.
|
|
avec :
|
Évalue ce cours !
Des quiz et exercices pour mieux assimiler sa leçon
La plateforme de soutien scolaire en ligne myMaxicours propose des quiz et exercices en accompagnement de chaque fiche de cours. Les exercices permettent de vérifier si la leçon est bien comprise ou s’il reste encore des notions à revoir.
Des exercices variés pour ne pas s’ennuyer
Les exercices se déclinent sous toutes leurs formes sur myMaxicours ! Selon la matière et la classe étudiées, retrouvez des dictées, des mots à relier ou encore des phrases à compléter, mais aussi des textes à trous et bien d’autres formats !
Dans les classes de primaire, l’accent est mis sur des exercices illustrés très ludiques pour motiver les plus jeunes.

Des quiz pour une évaluation en direct
Les quiz et exercices permettent d’avoir un retour immédiat sur la bonne compréhension du cours. Une fois toutes les réponses communiquées, le résultat s’affiche à l’écran et permet à l’élève de se situer immédiatement.
myMaxicours offre des solutions efficaces de révision grâce aux fiches de cours et aux exercices associés. L’élève se rassure pour le prochain examen en testant ses connaissances au préalable.

Des vidéos et des podcasts pour apprendre différemment
Certains élèves ont une mémoire visuelle quand d’autres ont plutôt une mémoire auditive. myMaxicours s’adapte à tous les enfants et adolescents pour leur proposer un apprentissage serein et efficace.
Découvrez de nombreuses vidéos et podcasts en complément des fiches de cours et des exercices pour une année scolaire au top !

Des podcasts pour les révisions
La plateforme de soutien scolaire en ligne myMaxicours propose des podcasts de révision pour toutes les classes à examen : troisième, première et terminale.
Les ados peuvent écouter les différents cours afin de mieux les mémoriser en préparation de leurs examens. Des fiches de cours de différentes matières sont disponibles en podcasts ainsi qu’une préparation au grand oral avec de nombreux conseils pratiques.

Des vidéos de cours pour comprendre en image
Des vidéos de cours illustrent les notions principales à retenir et complètent les fiches de cours. De quoi réviser sa prochaine évaluation ou son prochain examen en toute confiance !




Fiches de cours les plus recherchées

Envie de progresser et de réussir votre année scolaire ?
Testez gratuitement pendant 24h notre plateforme de soutien scolaire !

Un espace dédié aux parents pour suivre les progrès
Tout le programme scolaire du CP à la Terminale
Des profs expérimentés disponibles à la demande par tchat, audio ou vidéo