
Acquérir l'information - les différents capteurs
- Fiche de cours
- Quiz et exercices
- Vidéos et podcasts
Connaitre et différencier les différents types de capteurs.
- Il y a trois familles de capteurs : les capteurs TOR (tout-ou-rien), les capteurs analogiques et les capteurs numériques.
- Le signal produit est différent selon le type de capteur utilisé : signal analogique, signal logique ou signal logique codé.
- Le capteur peut être actif ou passif, selon qu’il a besoin ou non d’être intégré à un circuit pour fonctionner.
- Le capteur peut être proprioceptif ou extéroceptif, selon qu’il réalise les mesures localement ou de manière globale.

Les capteurs peuvent être caractérisés en fonction de la nature du signal de sortie.
Un signal électrique logique est un signal électrique qui ne peut prendre que deux valeurs. Ces deux valeurs sont nommées état haut et état bas.
L'état haut correspond souvent à la tension la plus haute que peut prendre le signal, communément 3,3 V ou 5 V, et l'état bas correspond à la tension la plus basse, communément 0 V.
- Les signaux logiques sont aussi nommés signaux binaires.
- Les capteurs TOR sont aussi nommés détecteurs, capteurs binaires ou capteurs logiques.
Une valeur de seuil est définie. Lorsque la grandeur d’entrée est inférieure au seuil, la sortie du capteur est à 0, lorsque la grandeur d’entrée est supérieure au seuil, la sortie du capteur est à 1.
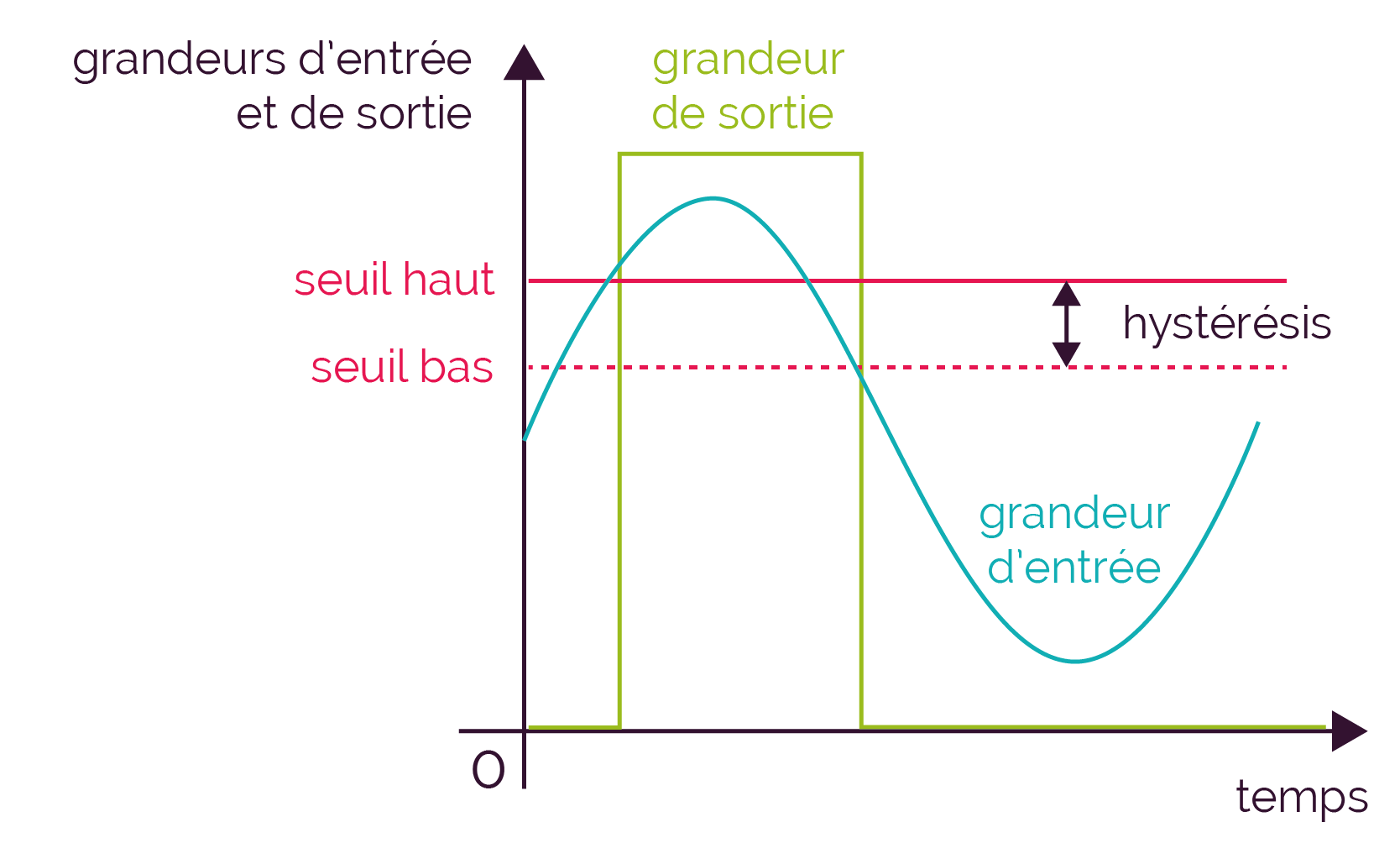
Dans la pratique, le capteur TOR possède deux seuils distincts afin d’éviter que la sortie ne devienne instable lorsque l’entrée est très proche du seuil.
- Pour que la sortie du capteur passe à l’état haut, il faut que la grandeur d’entrée passe au-dessus du seuil haut.
- Pour que la sortie du capteur passe à l’état bas, il faut que la grandeur d’entrée passe en dessous du seuil bas.
L’écart entre le seuil haut et le seuil bas est appelé hystérésis.
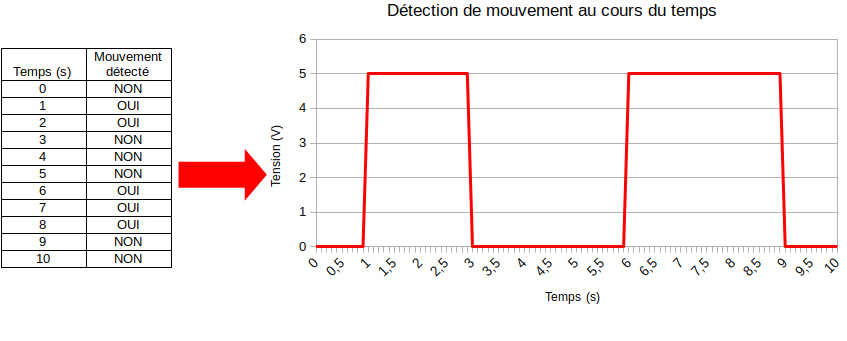
Un détecteur de mouvement infrarouge pourra détecter la présence ou l'absence de mouvement dans une pièce.
Les microcontrôleurs et les microprocesseurs sont capables de directement exploiter les signaux fournis par les capteurs TOR, car ce sont des signaux binaires.
Un signal électrique analogique est un signal électrique qui peut prendre toutes les valeurs possibles entre une valeur minimale et une valeur maximale.
L’opération de transformation s'appelle la transduction. La tension du signal sera directement liée à la valeur du phénomène physique capturé.
Un capteur de température analogique pourra fournir une tension proportionnelle à la température qu'il mesure. Pour chaque augmentation de 1 °C à partir de 0 °C, la tension augmentera de 0,1 V.
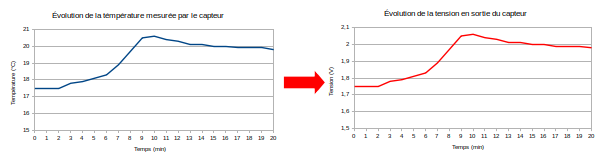
Il est rare que la tension soit simplement proportionnelle à la valeur du phénomène, mais en général la formule de passage de l'un à l'autre est donnée dans la fiche technique du capteur.
Un capteur analogique fournit une tension analogique qui ne sera pas directement exploitable par un cerveau numérique, comme un microcontrôleur ou un microprocesseur.
Les cartes Arduino, micro:bit et celles à base d'ESP8266 comportent un microcontrôleur ; les cartes Raspberry Pi, les ordinateurs et les smartphones comportent des microprocesseurs.
Pour qu'un microcontrôleur ou un microprocesseur puisse utiliser l'information d’un capteur analogique, il faudra préalablement que le signal soit numérisé par un composant qu'on appelle un CAN.
La plupart des cartes comportant un microcontrôleur possèdent un CAN intégré. Ce n’est généralement pas le cas des produits comportant un microprocesseur.
Un capteur numérique est un capteur qui effectue successivement :
- la transduction d'un phénomène physique en signal électrique analogique ;
- la numérisation du signal analogique en signal logique.
Le signal logique produit n'est pas un simple signal binaire comme celui produit par les capteurs TOR : c'est un signal logique codé. Cela signifie qu'il utilise un langage, appelé norme ou protocole de communication, pour transmettre sous forme binaire une information complexe comme un nombre, une lettre, un mot, un texte complet, etc.
Les capteurs numériques sont aussi nommés codeurs.
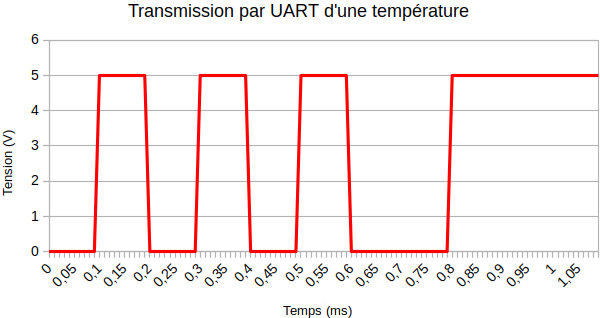
Un capteur de température numérique va mesurer puis transmettre la valeur 16,9 °C à un microcontrôleur, en se servant du protocole UART. Voici à quoi ressemble le signal logique codé qui permet de transmettre cette valeur.
Voici quelques normes ou protocoles de communication courants utilisés par les codeurs : UART, I2C, SPI, oneWire.
Chaque donnée que le capteur numérique transmet est donc un signal logique composé de plusieurs valeurs binaires (à l'état haut ou l'état bas) : ces valeurs binaires sont appelées des bits. L'ensemble des bits qui permettent de transmettre une donnée s'appelle une trame.
La trame que le capteur de température numérique transmet au microcontrôleur par UART comporte 11 bits.
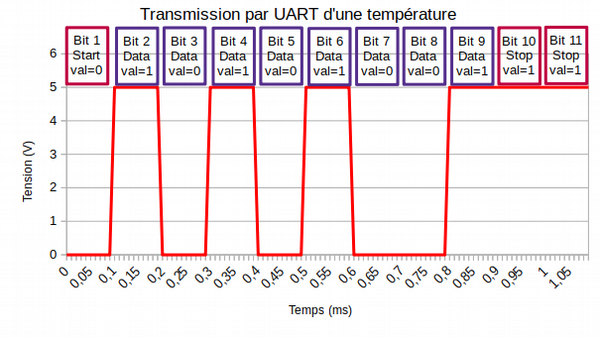
- Le bit 1 est un bit de start, qui permet d'indiquer que la trame débute.
- Les bits 10 et 11 sont des bits de stop qui permettent d'indiquer que la trame se termine.
- Les bits 2 à 9 sont les bits de
data qui permettent de transmettre la donnée.
Ici, la valeur binaire vaut (10101001)2, ce qui
correspond en décimal
à (169)10 qui est la valeur
que le capteur transmet
pour 16,9 °C.
Remarque : 1 × 20 + 0 × 21 + 0 × 22 + 1 × 23 + 0 × 24 + 1 × 25 + 0 × 26 + 1 × 27 = 169
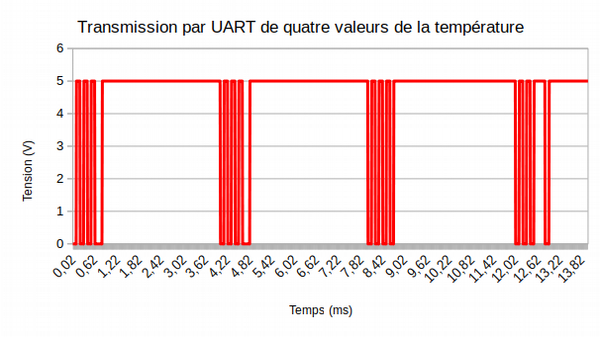
À chaque fois que le capteur numérique veut transmettre une valeur au microcontrôleur ou au microprocesseur, il doit lui envoyer une trame complète.
Le signal suivant montre comment se déroule la transmission de température par le capteur numérique durant environ 14 s, dans le cas où il transmet une nouvelle valeur de température toutes les 4 s.
Les microcontrôleurs et les microprocesseurs sont capables de directement exploiter les signaux fournis par les capteurs numériques car ce sont des signaux binaires.
Il faut néanmoins préciser au microcontrôleur ou au microprocesseur le protocole de communication utilisé et lui indiquer comment le lire. Cela se fera en utilisant des bibliothèques logicielles.
Les capteurs passifs ont besoin d’être intégrés dans un circuit avec une alimentation.
Voici quelques exemples de capteurs passifs.
La résistance interne d’un capteur résistif varie avec la grandeur physique.
- Mesure de la température par résistance à fil de platine ou par thermistance.
- Mesure d’effort par jauge de contrainte.
- Mesure d’intensité lumineuse par photorésistance.
L’inductance est l’aptitude d’un dipôle électronique à stocker de l’énergie magnétique lorsqu’il est traversé par un courant.
La valeur de l’inductance L d’un capteur inductif varie avec la grandeur physique. Un capteur inductif détecte uniquement les objets métalliques.
Le capteur inductif émet un champ magnétique. Les objets métalliques perturbent ce champ magnétique. C’est cette perturbation qui est détectée par le capteur.
- Détection de la présence d’objet métallique.
- Mesure de déplacement par inductance variable.
- Mesure d’effort par capteur magnétoélastique.
La capacité correspond à l’aptitude d’un dipôle électronique à stocker de l’énergie lorsqu’il est traversé par une tension.
La valeur de la capacité C d’un capteur capacitif varie avec la grandeur physique.
- Détection de la présence d’un objet quelle que soit sa nature.
- Détection du niveau d’un liquide dans une cuve.
- Mesure de déplacement et de position (l’une des armatures du condensateur est sur l’objet dont on veut mesurer le déplacement).
Cette énergie est généralement faible, ces capteurs nécessitent donc l’utilisation d’amplificateurs. Voici quelques exemples de capteurs passifs.
Les capteurs photoélectriques (ou photovoltaïques) sont basés sur la libération de charges électriques dans la matière sous l‘influence d’un rayonnement lumineux ou, plus généralement, d’une onde électromagnétique.
L’application d’une contrainte mécanique à certains matériaux dits piézoélectriques (le quartz par exemple) entraine l’apparition d’une tension entre leurs faces opposées.
Un champ magnétique B et un courant électrique I créent dans un matériau semi-conducteur une tension proportionnelle à B et I.
Mesure de courant avec une pince ampèremétrique.
En robotique mobile, il est important de faire la distinction entre les capteurs proprioceptifs et les capteurs extéroceptifs.
Les capteurs proprioceptifs effectuent leurs mesures par rapport à ce qu'ils perçoivent localement du déplacement du robot.
On peut mesurer les déplacements angulaires des roues d'un robot, ce qui permet de reconstituer sa trajectoire à condition que les roues ne glissent pas (dérapage, patinage). Il s’agit d’un capteur proprioceptif.
Les capteurs extéroceptifs se basent sur des mesures prises par rapport à l’environnement global (repère absolu).
Le repérage par une tourelle laser de balises optiques fixées dans l'environnement de déplacement du robot permet une mesure absolue. Il s’agit d'un capteur extéroceptif.
Évalue ce cours !
Des quiz et exercices pour mieux assimiler sa leçon
La plateforme de soutien scolaire en ligne myMaxicours propose des quiz et exercices en accompagnement de chaque fiche de cours. Les exercices permettent de vérifier si la leçon est bien comprise ou s’il reste encore des notions à revoir.
Des exercices variés pour ne pas s’ennuyer
Les exercices se déclinent sous toutes leurs formes sur myMaxicours ! Selon la matière et la classe étudiées, retrouvez des dictées, des mots à relier ou encore des phrases à compléter, mais aussi des textes à trous et bien d’autres formats !
Dans les classes de primaire, l’accent est mis sur des exercices illustrés très ludiques pour motiver les plus jeunes.

Des quiz pour une évaluation en direct
Les quiz et exercices permettent d’avoir un retour immédiat sur la bonne compréhension du cours. Une fois toutes les réponses communiquées, le résultat s’affiche à l’écran et permet à l’élève de se situer immédiatement.
myMaxicours offre des solutions efficaces de révision grâce aux fiches de cours et aux exercices associés. L’élève se rassure pour le prochain examen en testant ses connaissances au préalable.

Des vidéos et des podcasts pour apprendre différemment
Certains élèves ont une mémoire visuelle quand d’autres ont plutôt une mémoire auditive. myMaxicours s’adapte à tous les enfants et adolescents pour leur proposer un apprentissage serein et efficace.
Découvrez de nombreuses vidéos et podcasts en complément des fiches de cours et des exercices pour une année scolaire au top !

Des podcasts pour les révisions
La plateforme de soutien scolaire en ligne myMaxicours propose des podcasts de révision pour toutes les classes à examen : troisième, première et terminale.
Les ados peuvent écouter les différents cours afin de mieux les mémoriser en préparation de leurs examens. Des fiches de cours de différentes matières sont disponibles en podcasts ainsi qu’une préparation au grand oral avec de nombreux conseils pratiques.

Des vidéos de cours pour comprendre en image
Des vidéos de cours illustrent les notions principales à retenir et complètent les fiches de cours. De quoi réviser sa prochaine évaluation ou son prochain examen en toute confiance !




Fiches de cours les plus recherchées


Envie de progresser et de réussir votre année scolaire ?
Testez gratuitement pendant 24h notre plateforme de soutien scolaire !

Un espace dédié aux parents pour suivre les progrès
Tout le programme scolaire du CP à la Terminale
Des profs expérimentés disponibles à la demande par tchat, audio ou vidéo