
Les systèmes asservis
- Fiche de cours
- Quiz et exercices
- Vidéos et podcasts
- Comprendre la notion de système asservi et l’intérêt d’utiliser un asservissement.
- Connaitre le vocabulaire spécifique à l’asservissement.
- Lire un schéma bloc.
- Connaitre et utiliser les niveaux et les critères de performance d’une régulation.
- Un système asservi reçoit une consigne. À partir de cette consigne, il produit une commande. La commande est envoyée à ses actionneurs. L’action réalisée engendre une sortie, dont la mesure sera comparée avec la consigne. La différence entre sortie et consigne est appelée écart : une correction est mise en place pour diminuer cet écart.
- La qualité d’une régulation
dépend de :
- sa précision, qu’on évalue grâce à l’erreur statique ;
- sa rapidité, qu’on évalue grâce au temps de réponse à 5 % ;
- sa stabilité, qu’on évalue grâce au dépassement et en étudiant la convergence de la réponse.
- Connaitre les notions de chaine d’énergie et de chaine d’information.
- Savoir ce qu’est un capteur, un préactionneur, un actionneur et une unité de traitement.
Pour indiquer à un système ce qu'il doit faire, on lui fournit une consigne (vitesse, température, luminosité, etc.).
Le système détermine ensuite comment atteindre cette consigne. Pour cela, le système produit une commande (signal électrique) qu'il envoie à ses préactionneurs (relais, distributeurs, etc.) ou à ses actionneurs (moteurs, résistance chauffante, lampe, etc.).
L’effet finalement produit par l'actionneur (déplacement à une certaine vitesse, chauffage à une certaine température, éclairage à une certaine luminosité, etc.) est appelé sortie.
On souhaite qu'un robot avance à 15 km/h, on envoie donc la consigne « 15 km/h » au robot.
Le robot utilise son algorithme de déplacement pour produire la tension de commande correspondante.
Il envoie ensuite cette tension de commande aux moteurs qui contrôlent les roues. Il atteint finalement une vitesse de 15,2 km/h, qui est la sortie du système.
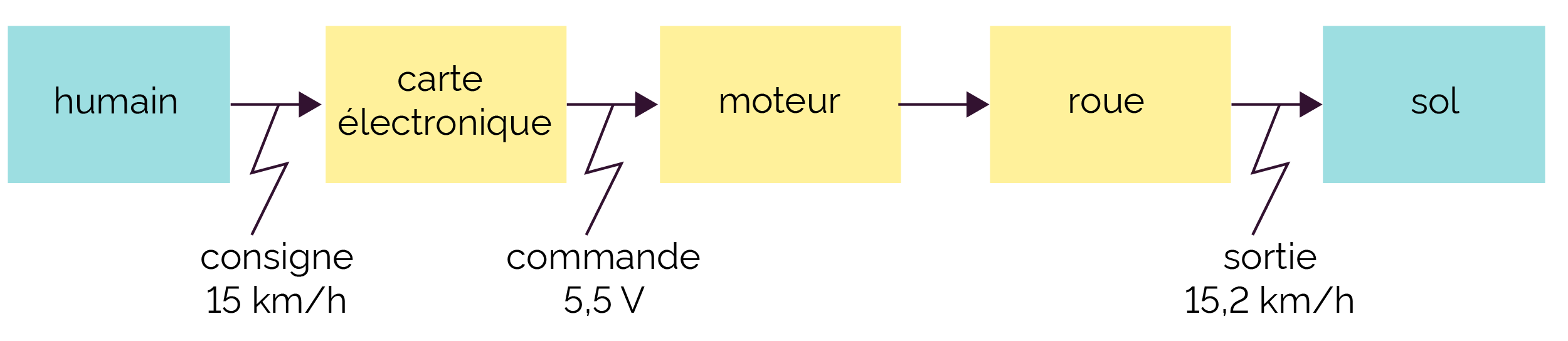
Chaine d’énergie/information de la vitesse du robot
Un système non asservi essaie d'appliquer la consigne, sans vérifier si elle est réellement suivie. Il n’effectue aucune comparaison entre la sortie et la consigne.
- d'une part, la consigne qu'il doit atteindre ;
- d'autre part, la sortie réellement produite.
Le système asservi mesure en permanence la sortie grâce à ses capteurs (capteur analogique, codeur, détecteur).
Cela permet ensuite à son unité de traitement (carte électronique, microcontrôleur, microprocesseur) de calculer l'écart entre la consigne et la sortie.
Le système asservi possède de plus une stratégie de correction, qui va lui permettre d'adapter la commande, pour réduire au maximum cet écart.
On souhaite qu'un robot avance à 15 km/h, ce robot dispose d’un asservissement.
Une fois la consigne reçue, le robot mesure sa vitesse actuelle. Son algorithme de déplacement compare ensuite sa vitesse actuelle avec la vitesse de la consigne. Il détermine alors la tension de commande la plus adaptée pour atteindre la consigne, puis l’envoie aux moteurs qui actionnent les roues.
Quelques millisecondes plus tard, le robot mesure de nouveau sa vitesse, et ajuste la tension de commande, et ainsi de suite. La sortie se rapproche au fur et à mesure de la consigne, jusqu'à en être le plus proche possible.
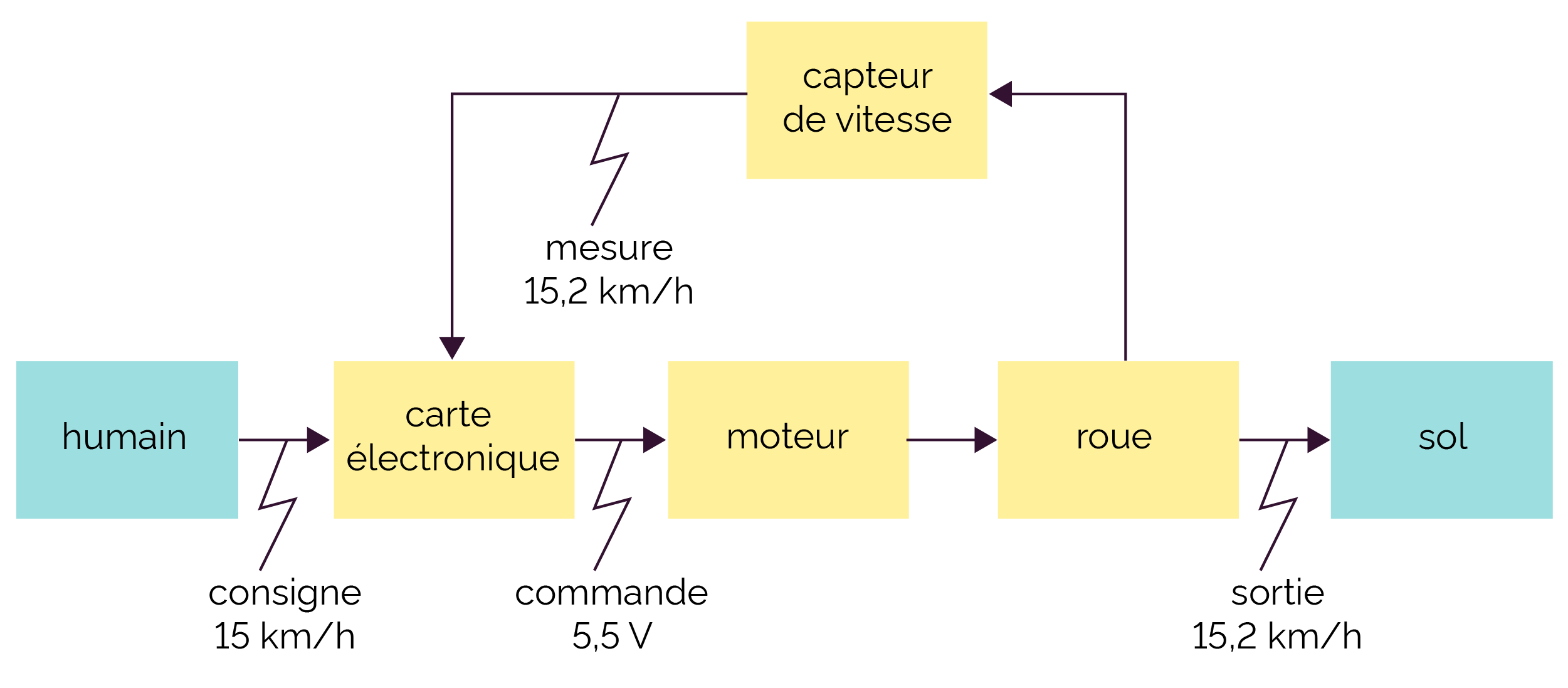
Chaine d’énergie/information de la vitesse du robot
Si le robot rencontre une perturbation en chemin (sol rugueux, pente, etc.), comme il mesure en permanence sa propre vitesse et recalcule la tension de commande, il pourra maintenir une sortie proche de la consigne.
De nombreux systèmes modernes possèdent un asservissement numérique. Une carte électronique reçoit et stocke la consigne, puis détermine la commande à envoyer aux préactionneurs et/ou aux actionneurs. Les actionneurs sont équipés de capteurs qui permettent de mesurer la sortie, et de la transmettre à la carte électronique pour qu'elle ajuste la commande.
Il est aussi possible de créer des systèmes asservis sans électronique, en se basant sur des phénomènes physiques comme l'inertie, l'évolution de la pression en fonction de la température, etc.
Pour l'étude des asservissements, les systèmes sont modélisés sous la forme de schémas blocs (aussi appelés schémas fonctionnels).
Un schéma bloc comporte une chaine directe et une chaine de retour.
Une chaine directe comprend les éléments suivants.
- Un flux qui représente la consigne.
- Un comparateur, qui compare la mesure et l'écart. La comparaison est effectuée par l’unité de traitement du système (carte électronique, microcontrôleur, microprocesseur).
- Un flux qui représente l'écart.
- Un correcteur qui détermine la commande. La correction est aussi effectuée par l’unité de traitement.
- Un flux qui représente la commande.
- Un élément commandé qui produit l'action (préactionneur et actionneurs : relais, distributeur, moteur, vérin, lampe, etc.).
- Un flux qui représente la sortie.
Une chaine de retour comprend les éléments suivants.
- Un capteur qui mesure l'action (capteur analogique, codeur, détecteur).
- Un flux qui représente la mesure de la sortie.
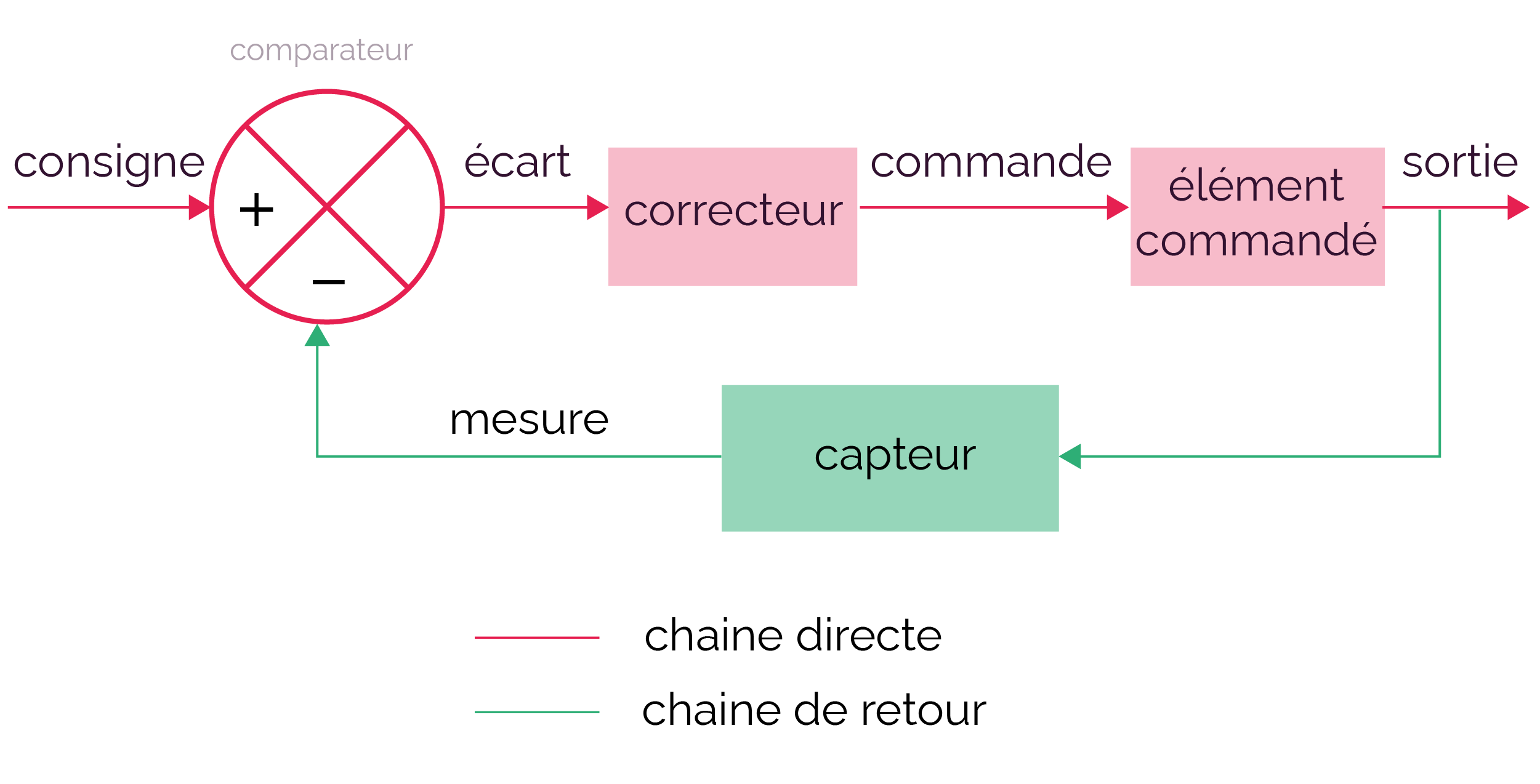
Schéma bloc : chaine directe et chaine de retour
On parle de système en boucle ouverte dans le cas d'un système non asservi, car il n’utilise pas de chaine de retour.
On parle de système en boucle fermée dans le cas d'un système asservi, car il utilise une chaine de retour.
Pour les systèmes en boucle fermée, on parle aussi de boucle de rétroaction.
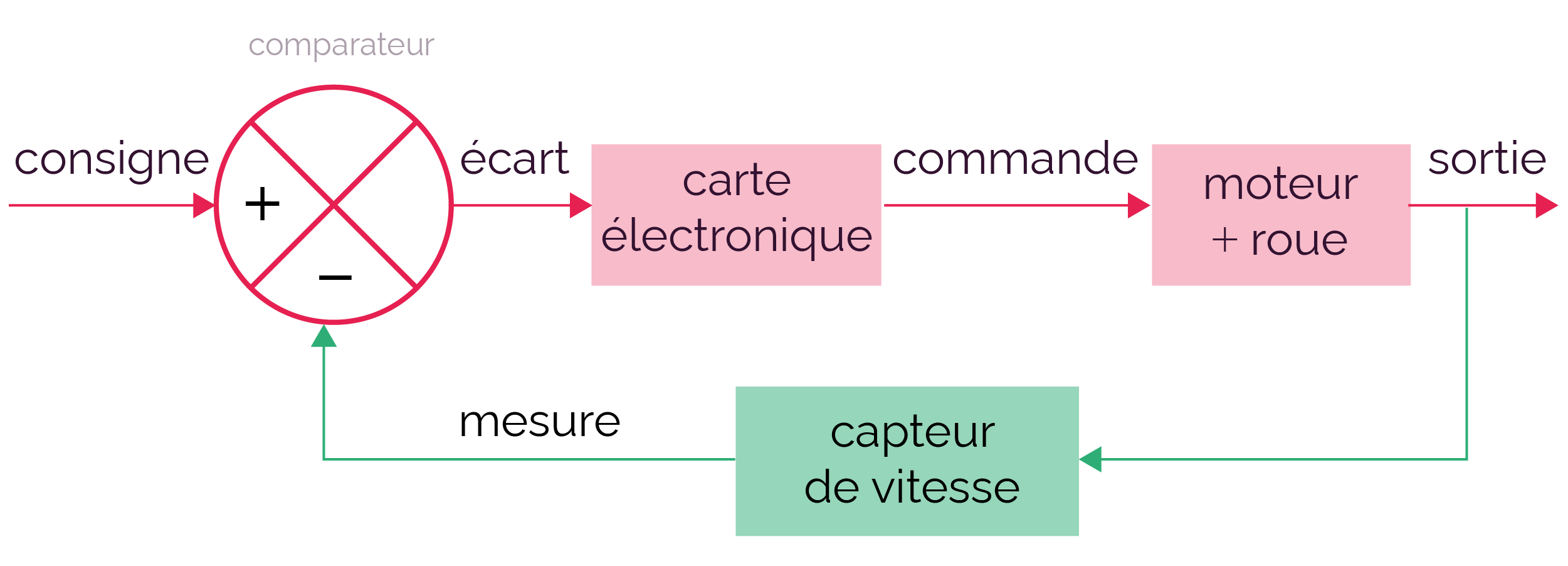
Schéma bloc d’un robot asservi
La qualité de la régulation s'évalue selon les trois facteurs suivants.
- Sa précision : c’est la capacité du système à réduire l’écart entre la sortie et la consigne.
- Sa rapidité : c’est la vitesse à laquelle le système atteindra la valeur finale de la sortie.
- Sa stabilité : c’est la capacité du système à faire converger sa sortie vers une valeur fixe.
Une bonne régulation permet d'atteindre un niveau de performance suffisant pour ces trois facteurs.
- Le niveau de performance visé pour chaque facteur est indiqué dans le cahier des charges.
- Les trois facteurs peuvent être améliorés conjointement jusqu'à un certain point. Ensuite, pour par exemple améliorer la précision, il faut souvent dégrader la rapidité. Il est donc courant de devoir faire un compromis entre les trois facteurs.
Trois critères de performance sont habituellement utilisés pour caractériser la précision, la rapidité et la stabilité d'une régulation : l'erreur statique, le temps de réponse à 5 % et le dépassement.
On peut de plus vérifier si la sortie converge vers une valeur, si elle oscille ou si elle diverge complètement.
Plus elle est faible, mieux c'est. L'erreur statique caractérise la précision de la régulation.
Elle se note ε et se calcule avec la formule suivante.
|
|
avec ε l'erreur statique, sans unité |
Une fois la régulation terminée, la vitesse du robot se stabilise à 14,4 km/h. On a donc un écart de 0,6 km/h.
L’erreur statique est ε =
 =
=  = 0,04 = 4 %.
= 0,04 = 4 %.
Plus il est court, mieux c'est. On mesure le temps de réponse quand la sortie a atteint sa valeur finale, à 5 % près. Autrement dit, c’est le temps pour que la sortie atteigne 95 % de sa valeur finale.
Le temps de réponse à 5 % caractérise la rapidité de la régulation.
Le temps de réponse
à 5 % s’exprime en seconde.
Il se note  .
.
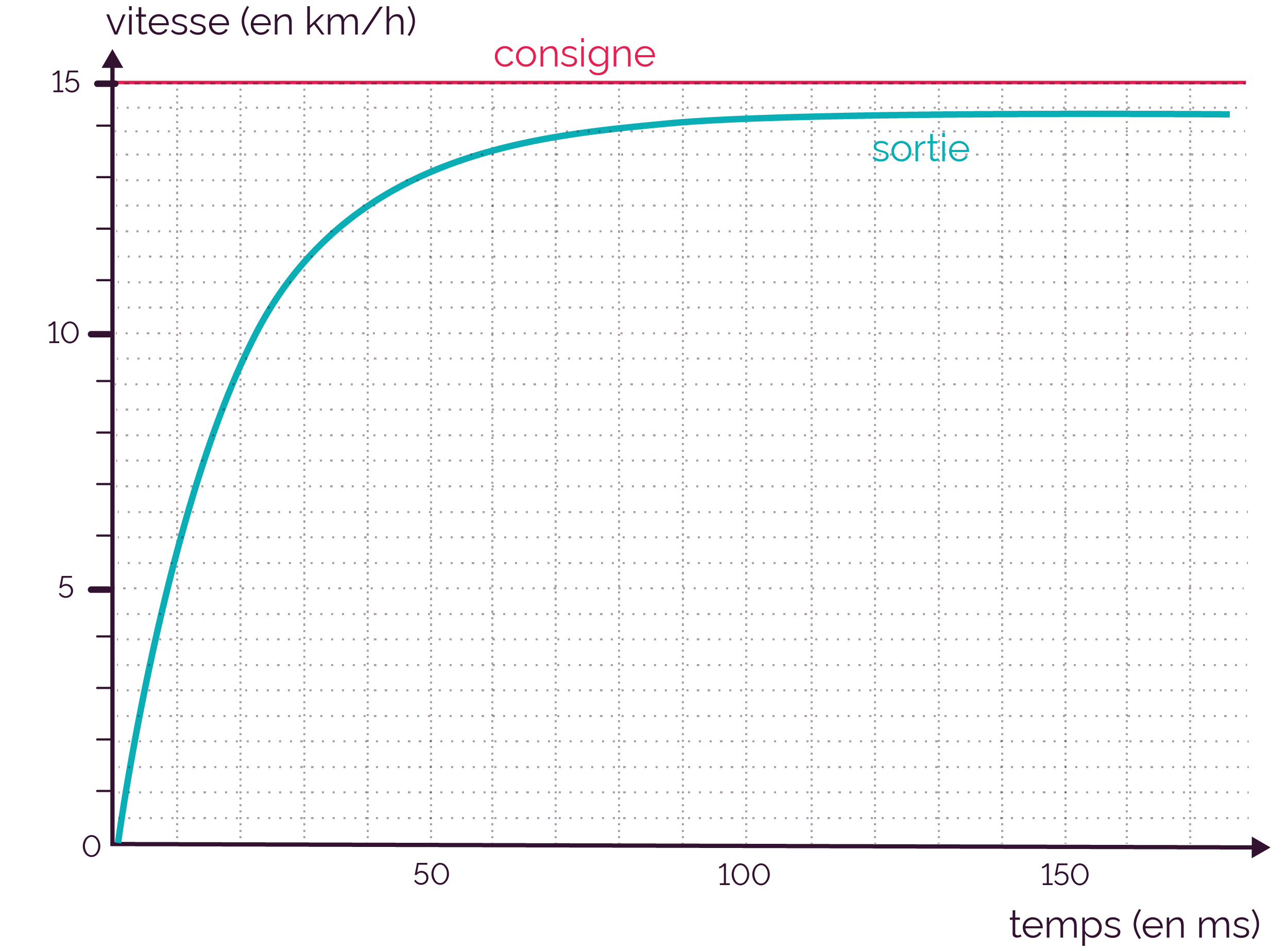
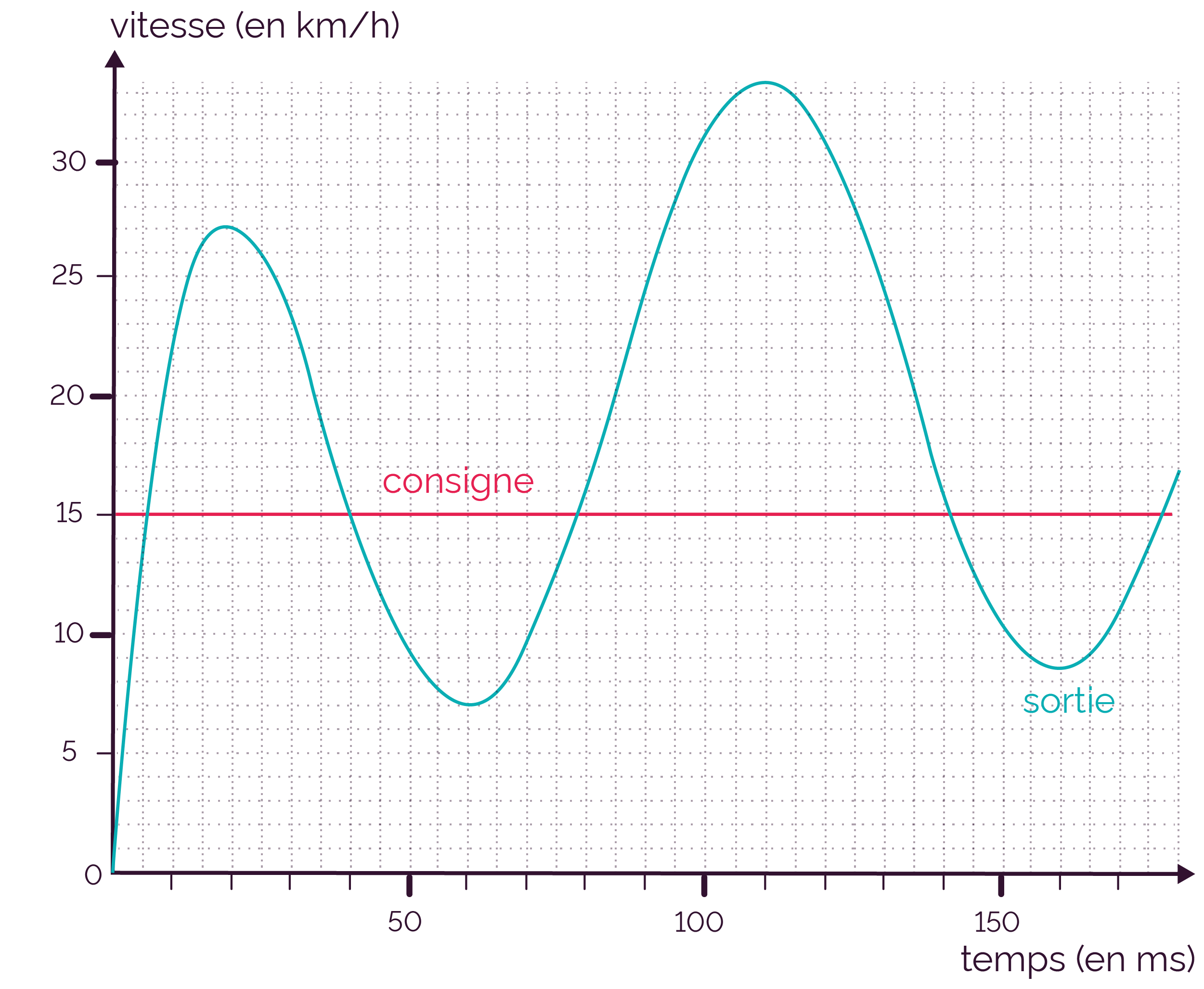
Le graphe ci-dessus montre, en bleu, la
réponse d’un robot à une consigne
de vitesse, en rouge, de 15 km/h.
Une fois la régulation terminée, la
vitesse du robot se stabilise
à 14,4 km/h.
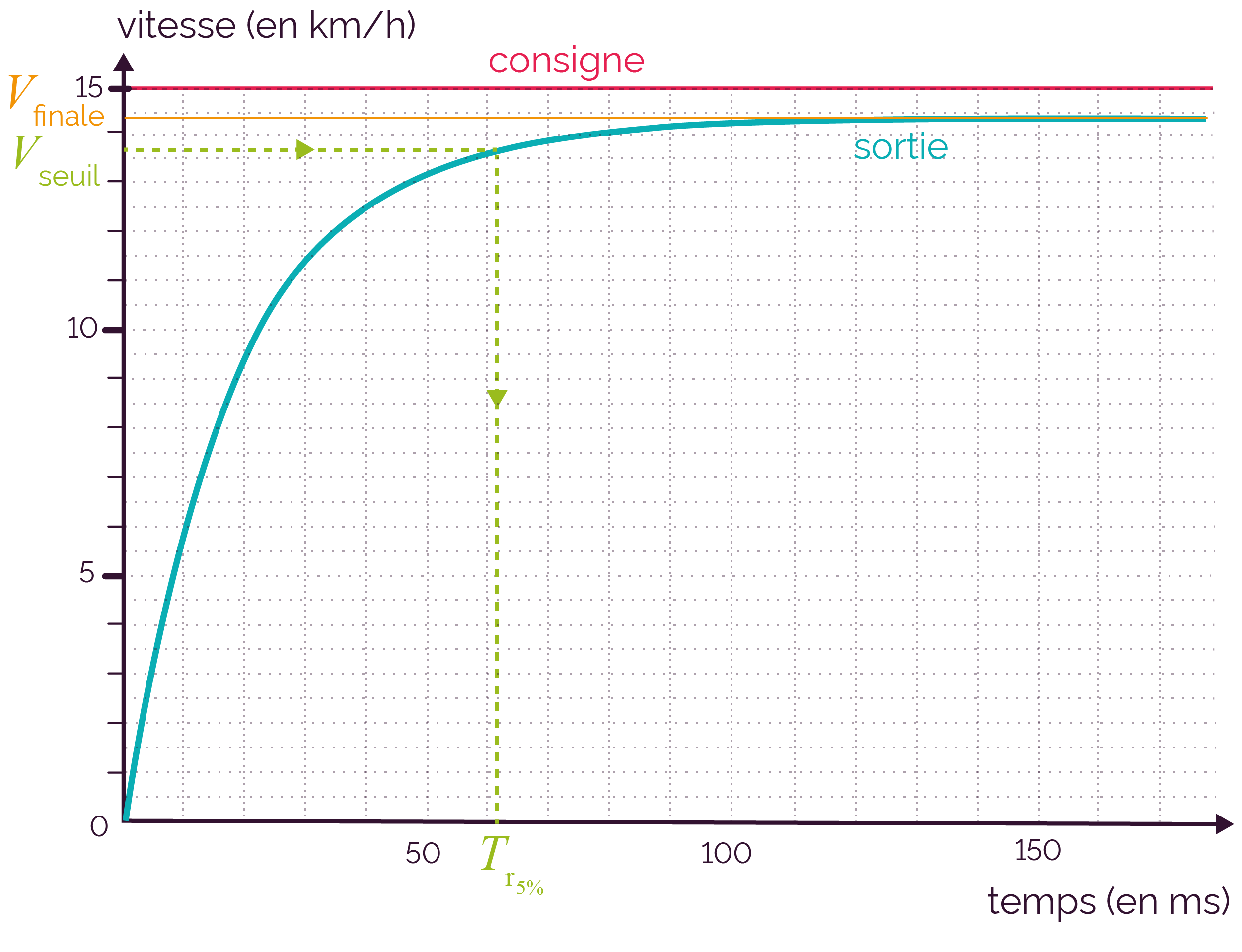
La valeur de vitesse qui sert de seuil pour
déterminer le temps de réponse
à 5 % est Vseuil = Vfinale × 95 % = 14,4 × 95 % = 13,68 km/h.
Par lecture graphique, cette vitesse seuil est
atteinte au bout de 62 ms. On aura
donc  = 0,062 s.
= 0,062 s.
Plus il est faible, mieux c'est. Le dépassement est lié à la stabilité et à la précision de la régulation.
Le dépassement s’exprime en pourcentage, relativement à la consigne. Il se note D et se calcule avec la formule suivante.
|
|
avec D le dépassement, sans unité |

Un dépassement trop important peut endommager le système.
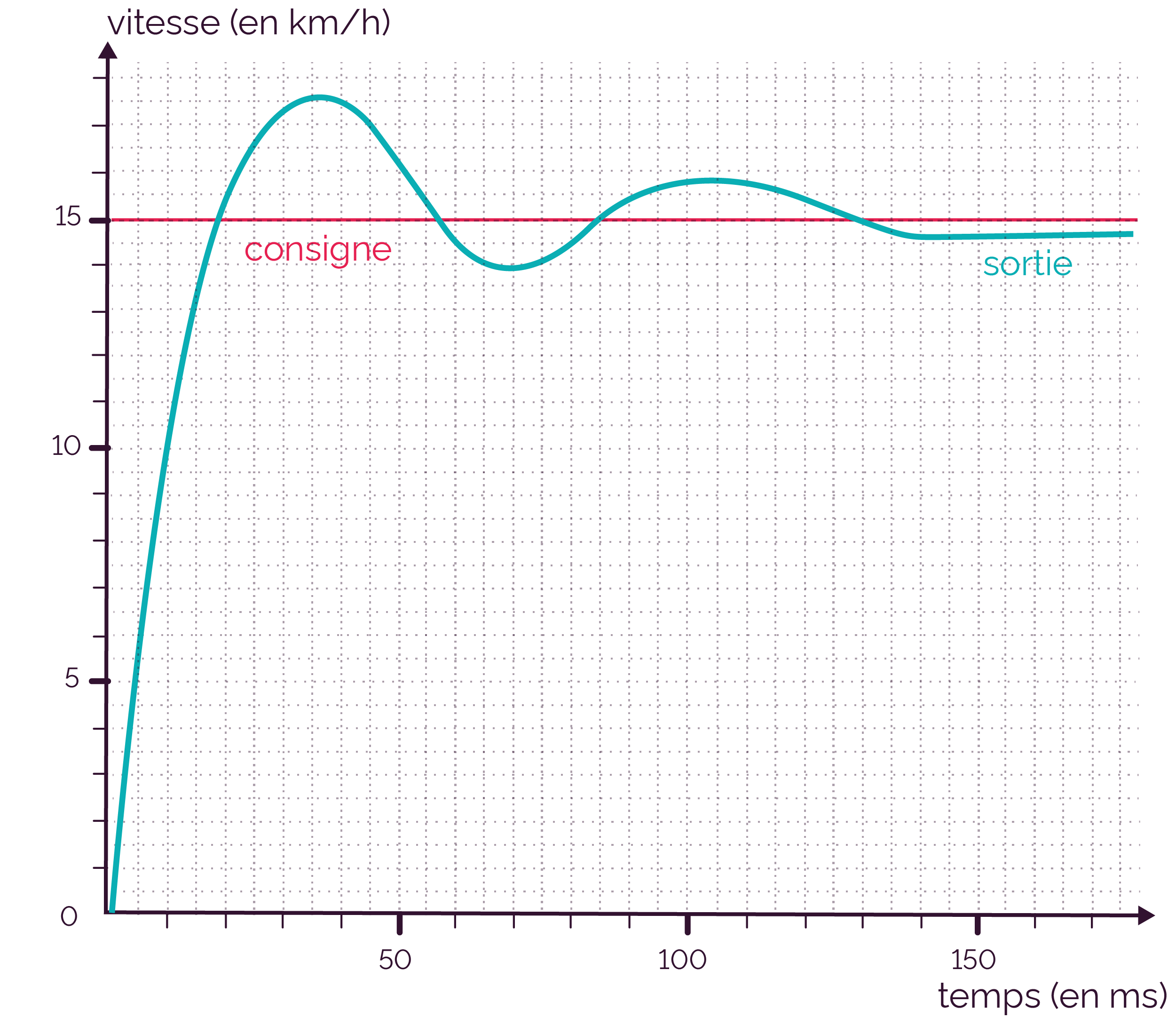
Le graphe ci-contre montre, en bleu, la
réponse d’un robot à une consigne
de vitesse, en rouge, de 15 km/h.
Un dépassement de la consigne a eu lieu. Par
lecture graphique, on détermine que la vitesse
maximale atteinte est
d’environ 17,6 km/h.
Le dépassement est D =  =
=  = 0,173 = 17,3 %.
= 0,173 = 17,3 %.
Enfin, il est possible que la réponse ne se stabilise jamais à une valeur fixe, mais oscille en permanence autour de la consigne, voire diverge complètement. Dans ce cas de figure, le système est considéré comme instable.
Le graphe ci-contre montre, en bleu, la
réponse d’un robot à une consigne
de vitesse, en rouge, de 15 km/h.
On voit que la sortie ne parvient pas à se
stabiliser autour d’une valeur fixe, elle
diverge de manière importante. Le
système est instable.
Évalue ce cours !
Des quiz et exercices pour mieux assimiler sa leçon
La plateforme de soutien scolaire en ligne myMaxicours propose des quiz et exercices en accompagnement de chaque fiche de cours. Les exercices permettent de vérifier si la leçon est bien comprise ou s’il reste encore des notions à revoir.
Des exercices variés pour ne pas s’ennuyer
Les exercices se déclinent sous toutes leurs formes sur myMaxicours ! Selon la matière et la classe étudiées, retrouvez des dictées, des mots à relier ou encore des phrases à compléter, mais aussi des textes à trous et bien d’autres formats !
Dans les classes de primaire, l’accent est mis sur des exercices illustrés très ludiques pour motiver les plus jeunes.

Des quiz pour une évaluation en direct
Les quiz et exercices permettent d’avoir un retour immédiat sur la bonne compréhension du cours. Une fois toutes les réponses communiquées, le résultat s’affiche à l’écran et permet à l’élève de se situer immédiatement.
myMaxicours offre des solutions efficaces de révision grâce aux fiches de cours et aux exercices associés. L’élève se rassure pour le prochain examen en testant ses connaissances au préalable.

Des vidéos et des podcasts pour apprendre différemment
Certains élèves ont une mémoire visuelle quand d’autres ont plutôt une mémoire auditive. myMaxicours s’adapte à tous les enfants et adolescents pour leur proposer un apprentissage serein et efficace.
Découvrez de nombreuses vidéos et podcasts en complément des fiches de cours et des exercices pour une année scolaire au top !

Des podcasts pour les révisions
La plateforme de soutien scolaire en ligne myMaxicours propose des podcasts de révision pour toutes les classes à examen : troisième, première et terminale.
Les ados peuvent écouter les différents cours afin de mieux les mémoriser en préparation de leurs examens. Des fiches de cours de différentes matières sont disponibles en podcasts ainsi qu’une préparation au grand oral avec de nombreux conseils pratiques.

Des vidéos de cours pour comprendre en image
Des vidéos de cours illustrent les notions principales à retenir et complètent les fiches de cours. De quoi réviser sa prochaine évaluation ou son prochain examen en toute confiance !




Fiches de cours les plus recherchées


Envie de progresser et de réussir votre année scolaire ?
Testez gratuitement pendant 24h notre plateforme de soutien scolaire !

Un espace dédié aux parents pour suivre les progrès
Tout le programme scolaire du CP à la Terminale
Des profs expérimentés disponibles à la demande par tchat, audio ou vidéo