
Moteurs asynchrones triphasés
- Fiche de cours
- Quiz et exercices
- Vidéos et podcasts
Lorsque le champ tournant entraîne un rotor qui est magnétisé comme l'aiguille d'une boussole, il l'entraîne strictement à la même vitesse que lui, en synchronisme, et nous avons à faire aux moteurs synchrones.
Le principe de fonctionnement des moteurs asynchrones est différent bien qu'il exploite le même champ tournant que les moteurs synchrones. Le rotor ne tourne pas en synchronisme avec le champ magnétique, il tourne moins vite, on dit qu'il est asynchrone.
Les moteurs asynchrones triphasés cumulent de multiples avantages : ils sont simples, robustes et faciles d'entretien. Toutes ces raisons expliquent leur popularité en milieu industriel.
Leurs applications sont nombreuses. On les retrouve, par exemple dans:
- les pompes,
- les convoyeurs,
- les élévateurs,
- les palans,
- etc...
Leur puissance varie d'une fraction de kW à plusieurs centaines de kW.
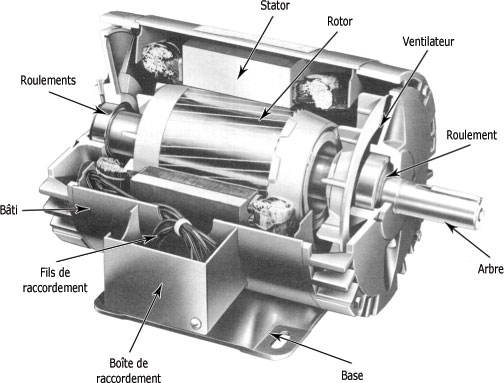
La figure suivante montre une vue en coupe d'un moteur asynchrone triphasé et identifie ses principaux composants.
Vue en coupe d'un moteur asynchrone triphasé :
Si l'on place dans un champ magnétique tournant un disque conducteur en matériau non magnétique (qui n'est pas attiré par un champ magnétique), en cuivre par exemple, à la place de l'aiguille aimantée, on constate qu'il se met à tourner également, comme le montre la figure suivante.
On peut considérer le disque comme équivalent à une infinité de conducteurs en court-circuit. Comme nous avons un déplacement relatif du champ tournant par rapport au disque, les conducteurs vont être le siège de courants induits. D'après la loi de Lenz, ces courants sont tels qu'ils s'opposent à la cause qui les a produits.
Ces courants sont à l'origine d'un champ magnétique secondaire qui est entraîné par le champ tournant, provoquant ainsi la rotation du disque. Mais ce dernier ne pourra jamais tourner au synchronisme, c'est-à-dire à la même vitesse que le champ tournant.
En effet, plus le disque accélère, plus sa vitesse relative avec le champ tournant devient petite. S'ils tournent tous les deux à la même vitesse, il y a immobilité relative du disque par rapport au champ, donc plus de courants induits, plus de champ secondaire et plus d'entraînement.
On aura donc toujours une différence entre la vitesse du champ tournant et celle du disque.
Dans un moteur asynchrone, le disque est remplacé par un rotor constitué de conducteurs placés dans des encoches.
Action d'un champ tournant sur un disque non magnétique :
Si le moteur tournait à la même vitesse que le champ magnétique tournant (vitesse synchrone), le flux magnétique ne couperait pas les conducteurs : la tension et le courant induits dans les conducteurs du rotor seraient nuls. Soumis à de telles conditions, le moteur ne pourrait pas tourner.
Pour produire un couple moteur, il est donc essentiel que la vitesse du rotor soit légèrement inférieure à la vitesse synchrone du champ tournant.
Le glissement est la différence entre la vitesse synchrone et la vitesse du rotor et il correspond à l'équation suivante :
.
Le glissement s'exprime aussi en pourcentage :
.
Dans laquelle :
g = glissement ;
ns = vitesse synchrone ;
n = vitesse du rotor.
Voyons un exemple d'application de cette équation :
Problème
:
Un moteur comptant 4
pôles par phase est alimenté à une source de
tension d'une fréquence de 60 Hz. Il tourne
à 1.725 min-1. Calculez la valeur du
glissement du moteur.
1. Calcul de la vitesse synchrone
Pour pouvoir calculer la valeur du glissement du moteur, on doit connaître la vitesse synchrone du champ magnétique tournant. On applique donc l'équation suivante :
 avec p = 2 paires de
pôles.
avec p = 2 paires de
pôles.
 .
.
ns = 1.800 min-1.
2. Calcul du glissement
Il ne reste plus qu'à effectuer le calcul suivant :
.
 d'où g = 0,042.
d'où g = 0,042.
Le glissement du moteur est donc de 0,042 ou de 4,2 %.
Stator :
Le stator des moteurs asynchrones triphasés est le même que celui du moteur synchrone ou de l'alternateur, c'est lui qui crée le champ tournant.
Il consiste en un bâti d'acier, contenant un empilage de tôles rainurées pour recevoir les enroulements qui sont divisés en trois bobines séparées, de manière à produire chacune des phases du système triphasé.
Rotor :
Vous venez de voir le principe du moteur asynchrone et du glissement avec un disque conducteur. Dans la réalité le rotor est constitué de tôles empilées de façon à former un cylindre comportant des encoches où sont logés des conducteurs en aluminium coulé ou en cuivre dont les extrémités sont court circuitées par des couronnes de même nature formant ainsi une "cage d'écureuil" comme le montre la figure suivante.
Le rotor peut recevoir également trois enroulements identiques constitués de conducteurs en cuivre reliés à des bagues servant à les court-circuiter. On a à faire dans ce cas à un rotor "bobine".
Ainsi, le rotor peut être de type cage d'écureuil ou bobiné. C'est d'ailleurs à cette caractéristique que l'on distingue les deux types de moteurs asynchrones triphasés ; il y a donc des moteurs à cage d'écureuil et des moteurs à rotor bobiné.
Les moteurs à cage d'écureuil sont de loin les plus utilisés : ils représentent de 80 à 85 % des applications en milieu industriel.
Cage d'écureuil en aluminium coulé :
Le rotor de type cage d'écureuil, apparaît à la figure a) suivante où on distingue les extrémités des barres et la couronne d'aluminium coulé.
Rotors des moteurs asynchrones triphasés :
Le rotor bobiné, illustré à la figure b) ci-dessus, possède des enroulements reliés à trois bagues collectrices, elles-mêmes montées sur l'arbre du moteur.
Rotor bobiné :
Le moteur à rotor bobiné possède un bobinage triphasé relié en étoile et branché à trois résistances externes à l'aide de bagues collectrices.
Ce type de moteur s'avère plus coûteux que le moteur à cage d'écureuil. Cependant, il présente les avantages suivants :
- le couple de démarrage est plus élevé ;
- il est possible de régler la vitesse du moteur à l'aide de résistances extérieures (rhéostat) ;
- le courant de démarrage est plus faible lorsqu'on ajoute un rhéostat.
Avec l'apparition de contrôleurs électroniques de plus en plus performants, l'utilisation des moteurs à rotor bobiné tend toutefois à diminuer dans les applications à vitesse variable au profit de moteurs à cage d'écureuil associés à des variateurs de vitesse à contrôle vectoriel de flux permettant des variations de 0 à 2 fois la vitesse de rotation nominale du moteur.
La figure suivante montre un moteur à rotor bobiné raccordé à un rhéostat extérieur servant à limiter le courant au démarrage et à régler la vitesse de marche.
Moteur à rotor bobiné relié à un rhéostat :
De par leur principe de fonctionnement, ces moteurs sont également appelés moteur à induction.
Ils peuvent être classés en fonction de différentes caractéristiques comme les conditions :
- de fonctionnement auxquelles ils seront soumis ;
- leurs caractéristiques électriques.
Caractéristiques électriques :
Puissances :
La puissance utile (Pu) est la puissance mécanique disponible sur l'arbre. Elle est liée au couple C par la relation.
Pu = C
.
Avec
Pu : Puissance utile en
.
C : Couple en Nm.
Et
Et telle que :
.
Avec N : Vitesse de rotation en min-1.
La puissance absorbée (Pa) est la puissance électrique absorbée par le moteur et est donnée par la relation :
.
Avec :
Pa : Puissance électrique absorbée en
U : Tension d'alimentation en V.
I : Courant de ligne absorbé en A.
Cos: Facteur de puissance.
La puissance nominale, qui est celle indiqué sur la plaque signalétique, correspond à la puissance utile pour la vitesse nominale du moteur.
Facteur de puissance et rendement :
Le facteur de puissance (cos
) ainsi que le rendement  évoluent en fonction de la charge du
moteur.
évoluent en fonction de la charge du
moteur.
Intensité :
L'intensité nominale (IN) correspond à l'intensité du courant absorbée par le moteur lorsqu'il fonctionne à sa puissance nominale et sous sa tension nominale.
L'intensité de démarrage (ID) est l'intensité du courant absorbée par le moteur au moment du démarrage direct du moteur. En général, ID vaut 3 à 7 fois IN.
Couple :
Le couple d'un moteur disponible sur l'arbre dépend de la vitesse de rotation et est donné par la courbe C = f (N) dont l'allure est donnée sur la figure suivante.
Courbe de couple en fonction de la vitesse d'un moteur asynchrone triphasé :
Le couple accélérateur est la différence entre le couple moteur et le couple résistant pendant la phase de démarrage du moteur.
Conditions de fonctionnement :
Dans le domaine industriel, les moteurs doivent fonctionner dans des conditions très variées. C'est pourquoi leur construction diffère selon l'environnement auquel ils seront soumis. On distingue donc des moteurs :
- abrités ;
- à l'épreuve des éclaboussures ;
- blindés avec ventilateur extérieur ;
- à l'épreuve des explosions.
Comme pour les machines tournantes, c'est l'indice de protection (IP et IK) qui définit les niveaux de protection de la machine dans son environnement. La plupart des machines ont un indice IP55 c'est-à-dire qu'elle est protégée contre les poussières et contre les jets d'eau dans toutes les directions. Le 3e chiffre est remplacé par l'indice IK, protection contre les impacts mécaniques. Il est défini par la norme UTE 20-015 et est donné sur le tableau de la figure suivante.
Indice IK de protection contre les impacts mécaniques :
![]()
Conditions normales d'utilisation :
Les conditions normales d'utilisation des moteurs standards sont définies par la norme CEI 34-1 comme suit :
- Température ambiante comprise en - 16 et + 40 °C,
- Altitude inférieure à 1.000 m,
- Pression atmosphérique 1050 hPa.
Pour des conditions d'emploi différente, on appliquera un coefficient de correction de la puissance selon des abaques donnés par le constructeur. La classe d'isolation du bobinage donne les températures et les échauffements limites dans les conditions normales d'utilisation (figure suivante, normes NF C 51-111 et CEI 34-1).
Classes d'isolation :
Plaque signalétique :
Une plaque signalétique est habituellement placée sur le moteur, à un endroit visible.
Cette plaque contient des informations relatives aux caractéristiques électriques et mécaniques du moteur. Il s'agit donc là d'une source d'information très utile pour l'électromécanicien et l'électromécanicienne.
Vous pouvez voir sur la figure suivante une plaque signalétique ainsi que les définitions des différents symboles.
Plaques signalétiques :
Suite à cette étude, vous devriez retenir particulièrement les points suivants :
• Les moteurs asynchrones triphasés à cage d'écureuil sont les moteurs que l'on rencontre le plus souvent en industrie.
• La puissance des moteurs à cage d'écureuil va d'une fraction de kW à plusieurs centaines de kW.
• Le glissement d'un moteur à induction triphasé représente la différence entre la vitesse synchrone et la vitesse du rotor. Un certain glissement est essentiel pour développer un couple moteur.
• L'équation permettant de calculer le glissement d'un moteur est la suivante :
.
• Le stator des moteurs asynchrones triphasés possède trois enroulements déphasés de 120° les uns par rapport aux autres.
• Le rotor des moteurs asynchrones triphasés peut être de deux types :
- à cage d'écureuil ;
- bobiné.• Les moteurs asynchrones à rotor bobiné permettent de limiter le courant de démarrage et d'augmenter le couple de démarrage.
• La vitesse de rotation d'un moteur à rotor bobiné peut être contrôlée à l'aide d'un rhéostat extérieur.
• Les moteurs sont classés en fonction de leurs conditions d'utilisation en fonction de leurs indices de protection IP et IK de même qu'en fonction de leurs caractéristiques électriques.
• La plaque signalétique des moteurs contient plusieurs informations relatives à leurs caractéristiques électriques et mécaniques.
Évalue ce cours !
Des quiz et exercices pour mieux assimiler sa leçon
La plateforme de soutien scolaire en ligne myMaxicours propose des quiz et exercices en accompagnement de chaque fiche de cours. Les exercices permettent de vérifier si la leçon est bien comprise ou s’il reste encore des notions à revoir.
Des exercices variés pour ne pas s’ennuyer
Les exercices se déclinent sous toutes leurs formes sur myMaxicours ! Selon la matière et la classe étudiées, retrouvez des dictées, des mots à relier ou encore des phrases à compléter, mais aussi des textes à trous et bien d’autres formats !
Dans les classes de primaire, l’accent est mis sur des exercices illustrés très ludiques pour motiver les plus jeunes.

Des quiz pour une évaluation en direct
Les quiz et exercices permettent d’avoir un retour immédiat sur la bonne compréhension du cours. Une fois toutes les réponses communiquées, le résultat s’affiche à l’écran et permet à l’élève de se situer immédiatement.
myMaxicours offre des solutions efficaces de révision grâce aux fiches de cours et aux exercices associés. L’élève se rassure pour le prochain examen en testant ses connaissances au préalable.

Des vidéos et des podcasts pour apprendre différemment
Certains élèves ont une mémoire visuelle quand d’autres ont plutôt une mémoire auditive. myMaxicours s’adapte à tous les enfants et adolescents pour leur proposer un apprentissage serein et efficace.
Découvrez de nombreuses vidéos et podcasts en complément des fiches de cours et des exercices pour une année scolaire au top !

Des podcasts pour les révisions
La plateforme de soutien scolaire en ligne myMaxicours propose des podcasts de révision pour toutes les classes à examen : troisième, première et terminale.
Les ados peuvent écouter les différents cours afin de mieux les mémoriser en préparation de leurs examens. Des fiches de cours de différentes matières sont disponibles en podcasts ainsi qu’une préparation au grand oral avec de nombreux conseils pratiques.

Des vidéos de cours pour comprendre en image
Des vidéos de cours illustrent les notions principales à retenir et complètent les fiches de cours. De quoi réviser sa prochaine évaluation ou son prochain examen en toute confiance !




Envie de progresser et de réussir votre année scolaire ?
Testez gratuitement pendant 24h notre plateforme de soutien scolaire !

Un espace dédié aux parents pour suivre les progrès
Tout le programme scolaire du CP à la Terminale
Des profs expérimentés disponibles à la demande par tchat, audio ou vidéo